Product Description
| Specification | ||
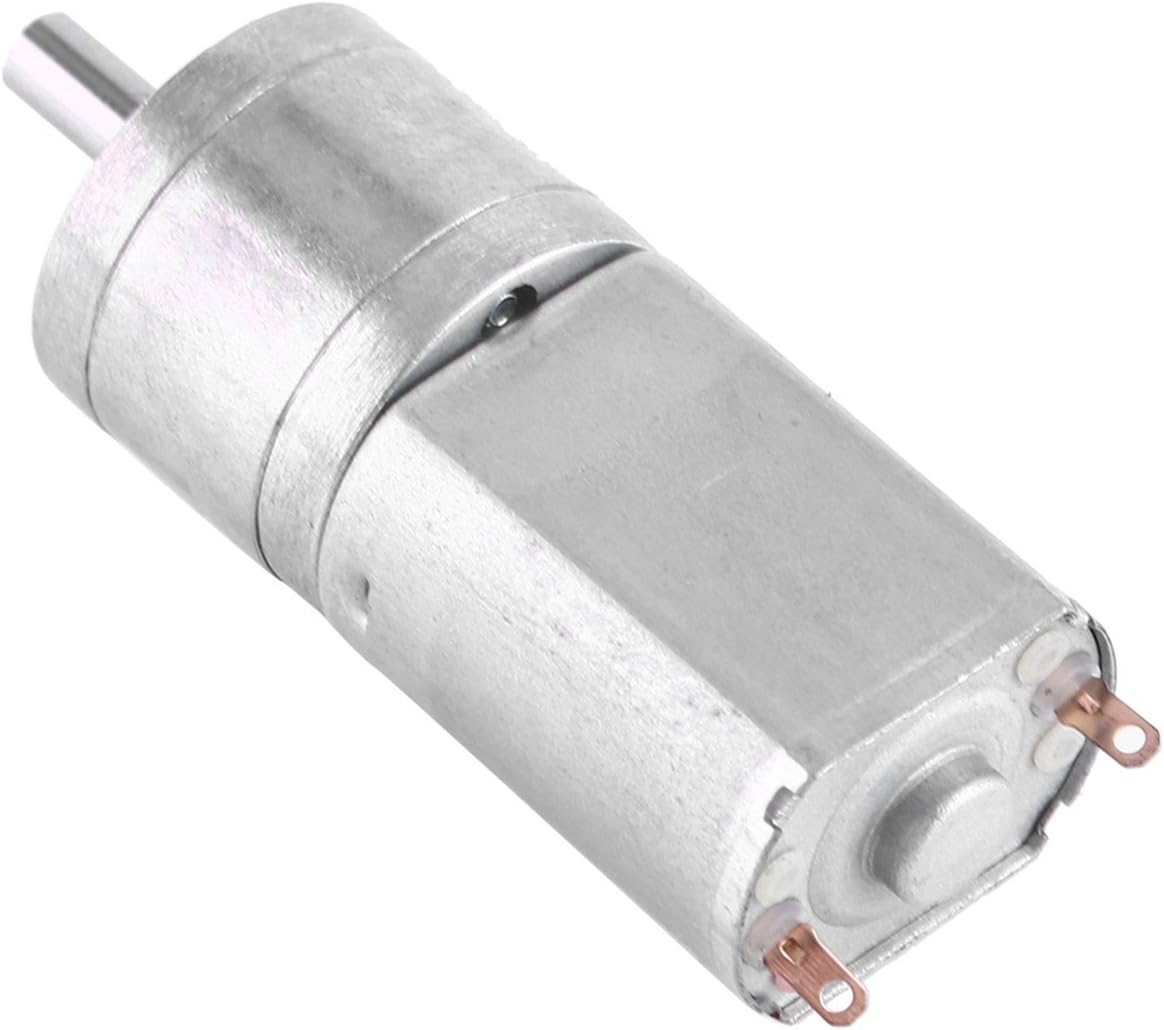
| 1520W Oilless Motor 100% Copper Wire | ||
| Motor Size:26.5×19.5cm Side Diameter:13.8cm | ||
| Edge Distance: 21.5×8.5cm | ||
| 220V 50HZ/60HZ | ||
| Motor Thickness: | 70mm | |
| Silicon Steel Sheet | 140pcs | |
| Cylinder Diameter | 63.70mm | |
| Adaptive Capacity | 30uf | |
| Net Weight | 9.6kgs | |
| Air Delivery | 120L/min | |
| QTY/CTN | 2pcs/ctn | |
| Meas: | 36x34x29.5cm=0.036cbm | |
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Lubrication Style: | Oil-free |
|---|---|
| Cooling System: | Air Cooling |
| Cylinder Arrangement: | Duplex Arrangement |
| Cylinder Position: | Vertical |
| Structure Type: | Open Type |
| Compress Level: | Double-Stage |
| Customization: |
Available
|
|
|---|

What role do AC motors play in HVAC (heating, ventilation, and air conditioning) systems?
In HVAC (heating, ventilation, and air conditioning) systems, AC motors play a crucial role in various components and functions. These motors are responsible for powering fans, compressors, pumps, and other essential equipment within the HVAC system. Let’s explore the specific roles of AC motors in HVAC systems:
- Air Handling Units (AHUs) and Ventilation Systems: AC motors drive the fans in AHUs and ventilation systems. These fans draw in fresh air, circulate air within the building, and exhaust stale air. The motors provide the necessary power to move air through the ductwork and distribute it evenly throughout the space. They play a key role in maintaining proper indoor air quality, controlling humidity, and ensuring adequate ventilation.
- Chillers and Cooling Towers: HVAC systems that use chillers for cooling rely on AC motors to drive the compressor. The motor powers the compressor, which circulates refrigerant through the system, absorbing heat from the indoor environment and releasing it outside. AC motors are also used in cooling towers, which dissipate heat from the chiller system by evaporating water. The motors drive the fans that draw air through the cooling tower and enhance heat transfer.
- Heat Pumps: AC motors are integral components of heat pump systems, which provide both heating and cooling. The motor drives the compressor in the heat pump, enabling the transfer of heat between the indoor and outdoor environments. During cooling mode, the motor circulates refrigerant to extract heat from indoors and release it outside. In heating mode, the motor reverses the refrigerant flow to extract heat from the outdoor air or ground and transfer it indoors.
- Furnaces and Boilers: In heating systems, AC motors power the blowers or fans in furnaces and boilers. The motor drives the blower to distribute heated air or steam throughout the building. This helps maintain a comfortable indoor temperature and ensures efficient heat distribution in the space.
- Pumps and Circulation Systems: HVAC systems often incorporate pumps for water circulation, such as in hydronic heating or chilled water systems. AC motors drive these pumps, providing the necessary pressure to circulate water or other heat transfer fluids through the system. The motors ensure efficient flow rates and contribute to the effective transfer of thermal energy.
- Dampers and Actuators: AC motors are used in HVAC systems to control airflow and regulate the position of dampers and actuators. These motors enable the adjustment of airflow rates, temperature control, and zone-specific climate control. By modulating the motor speed or position, HVAC systems can achieve precise control of air distribution and temperature in different areas of a building.
AC motors in HVAC systems are designed to meet specific performance requirements, such as variable speed control, energy efficiency, and reliable operation under varying loads. Maintenance and regular inspection of these motors are essential to ensure optimal performance, energy efficiency, and longevity of the HVAC system.
In conclusion, AC motors play vital roles in HVAC systems by powering fans, compressors, pumps, and actuators. They enable proper air circulation, temperature control, and efficient transfer of heat, contributing to the overall comfort, air quality, and energy efficiency of buildings.

Can you explain the difference between single-phase and three-phase AC motors?
In the realm of AC motors, there are two primary types: single-phase and three-phase motors. These motors differ in their construction, operation, and applications. Let’s explore the differences between single-phase and three-phase AC motors:
- Number of Power Phases: The fundamental distinction between single-phase and three-phase motors lies in the number of power phases they require. Single-phase motors operate using a single alternating current (AC) power phase, while three-phase motors require three distinct AC power phases, typically referred to as phase A, phase B, and phase C.
- Power Supply: Single-phase motors are commonly connected to standard residential or commercial single-phase power supplies. These power supplies deliver a voltage with a sinusoidal waveform, oscillating between positive and negative cycles. In contrast, three-phase motors require a dedicated three-phase power supply, typically found in industrial or commercial settings. Three-phase power supplies deliver three separate sinusoidal waveforms with a specific phase shift between them, resulting in a more balanced and efficient power delivery system.
- Starting Mechanism: Single-phase motors often rely on auxiliary components, such as capacitors or starting windings, to initiate rotation. These components help create a rotating magnetic field necessary for motor startup. Once the motor reaches a certain speed, these auxiliary components may be disconnected or deactivated. Three-phase motors, on the other hand, typically do not require additional starting mechanisms. The three-phase power supply inherently generates a rotating magnetic field, enabling self-starting capability.
- Power and Torque Output: Three-phase motors generally offer higher power and torque output compared to single-phase motors. The balanced nature of three-phase power supply allows for a more efficient distribution of power across the motor windings, resulting in increased performance capabilities. Three-phase motors are commonly used in applications requiring high power demands, such as industrial machinery, pumps, compressors, and heavy-duty equipment. Single-phase motors, with their lower power output, are often used in residential appliances, small commercial applications, and light-duty machinery.
- Efficiency and Smoothness of Operation: Three-phase motors typically exhibit higher efficiency and smoother operation than single-phase motors. The balanced three-phase power supply helps reduce electrical losses and provides a more constant and uniform torque output. This results in improved motor efficiency, reduced vibration, and smoother rotation. Single-phase motors, due to their unbalanced power supply, may experience more pronounced torque variations and slightly lower efficiency.
- Application Suitability: The choice between single-phase and three-phase motors depends on the specific application requirements. Single-phase motors are suitable for powering smaller appliances, such as fans, pumps, household appliances, and small tools. They are commonly used in residential settings where single-phase power is readily available. Three-phase motors are well-suited for industrial and commercial applications that demand higher power levels and continuous operation, including large machinery, conveyors, elevators, air conditioning systems, and industrial pumps.
It’s important to note that while single-phase and three-phase motors have distinct characteristics, there are also hybrid motor designs, such as dual-voltage motors or capacitor-start induction-run (CSIR) motors, which aim to bridge the gap between the two types and offer flexibility in certain applications.
When selecting an AC motor, it is crucial to consider the specific power requirements, available power supply, and intended application to determine whether a single-phase or three-phase motor is most suitable for the task at hand.
What is an AC motor, and how does it differ from a DC motor?
An AC motor, also known as an alternating current motor, is a type of electric motor that operates on alternating current. It converts electrical energy into mechanical energy through the interaction of magnetic fields. AC motors are widely used in various applications, ranging from household appliances to industrial machinery. Here’s a detailed explanation of what an AC motor is and how it differs from a DC motor:
AC Motor:
An AC motor consists of two main components: the stator and the rotor. The stator is the stationary part of the motor and contains the stator windings. These windings are typically made of copper wire and are arranged in specific configurations to create a rotating magnetic field when energized by an alternating current. The rotor, on the other hand, is the rotating part of the motor and is typically made of laminated steel cores with conducting bars or coils. The rotor windings are connected to a shaft, and their interaction with the rotating magnetic field produced by the stator causes the rotor to rotate.
The operation of an AC motor is based on the principles of electromagnetic induction. When the stator windings are energized with an AC power supply, the changing magnetic field induces a voltage in the rotor windings, which in turn creates a magnetic field. The interaction between the rotating magnetic field of the stator and the magnetic field of the rotor produces a torque, causing the rotor to rotate. The speed of rotation depends on the frequency of the AC power supply and the number of poles in the motor.
DC Motor:
A DC motor, also known as a direct current motor, operates on direct current. Unlike an AC motor, which relies on the interaction of magnetic fields to generate torque, a DC motor uses the principle of commutation to produce rotational motion. A DC motor consists of a stator and a rotor, similar to an AC motor. The stator contains the stator windings, while the rotor consists of a rotating armature with coils or permanent magnets.
In a DC motor, when a direct current is applied to the stator windings, a magnetic field is created. The rotor, either through the use of brushes and a commutator or electronic commutation, aligns itself with the magnetic field and begins to rotate. The direction of the current in the rotor windings is continuously reversed to ensure continuous rotation. The speed of a DC motor can be controlled by adjusting the voltage applied to the motor or by using electronic speed control methods.
Differences:
The main differences between AC motors and DC motors are as follows:
- Power Source: AC motors operate on alternating current, which is the standard power supply in most residential and commercial buildings. DC motors, on the other hand, require direct current and typically require a power supply that converts AC to DC.
- Construction: AC motors and DC motors have similar construction with stators and rotors, but the design and arrangement of the windings differ. AC motors generally have three-phase windings, while DC motors can have either armature windings or permanent magnets.
- Speed Control: AC motors typically operate at fixed speeds determined by the frequency of the power supply and the number of poles. DC motors, on the other hand, offer more flexibility in speed control and can be easily adjusted over a wide range of speeds.
- Efficiency: AC motors are generally more efficient than DC motors. AC motors can achieve higher power densities and are often more suitable for high-power applications. DC motors, however, offer better speed control and are commonly used in applications that require precise speed regulation.
- Applications: AC motors are widely used in applications such as industrial machinery, HVAC systems, pumps, and compressors. DC motors find applications in robotics, electric vehicles, computer disk drives, and small appliances.
In conclusion, AC motors and DC motors differ in their power source, construction, speed control, efficiency, and applications. AC motors rely on the interaction of magnetic fields and operate on alternating current, while DC motors use commutation and operate on direct current. Each type of motor has its advantages and is suited for different applications based on factors such as power requirements, speed control needs, and efficiency considerations.


editor by CX 2024-05-14
China best Hydraulic Gear Motor Rotary Flow Divider with Relief Valve vacuum pump and compressor
Product Description
Hydraulic Gear Motor Rotary Flow Divider with relief valve
Product Description
| Displacement | Minimum Flow/sec | Maximum Flow/sec |
| ml/r | GPM | GPM |
| 1.6 | 0.8 | 1.7 |
| 2.13 | 1.2 | 2.5 |
| 3.18 | 1.7 | 4.5 |
| 4.24 | 2.5 | 5.0 |
| 5.29 | 3.0 | 6.0 |
| 6.36 | 3.5 | 7.0 |
| 7.42 | 4.0 | 8.0 |
| 8.42 | 4.5 | 9.0 |
| Displacement | Minimum Flow/sec | Maximum Flow/sec |
| ml/r | GPM | GPM |
| 6 | 1.0 | 4.8 |
| 8 | 1.5 | 5.8 |
| 11 | 1.8 | 7.1 |
| 14 | 2.0 | 9.0 |
| 17 | 2.5 | 9.8 |
| 25 | 3.5 | 14.0 |
| 31 | 4.0 | 18.5 |
Company Information
ZheJiang CHINAMFG Hydraulic Technology Co., Ltd
With world class manufacturing facilities, expertise and manufactures in the fluid power industry for over 30 years;
ZheJiang office set in CHINAMFG Building Xihu (West Lake) Dis. District, ZheJiang
Factory set in ZheJiang City, ZheJiang Provience. Four hours driving from ZheJiang .
Our Services
1.Each item tested before delivery;
2.1 year warranty;
3.GRH R&D department: full technician support;
4.GRH quality department: Your feedback help us perform better.
5.Certificate
6.Exhibition
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Drive: | Hydraulic |
|---|---|
| Type: | Hydraulic Motor |
| Name: | Hydraulic Gear Motor Rotary Flow Divider with Rel |
| Relief Pressure: | 200bar |
| Flow: | 20lpm |
| Usage: | Simultaneous Flow Divider System |
| Customization: |
Available
|
|
|---|
What types of feedback mechanisms are commonly integrated into gear motors for control?
Gear motors often incorporate feedback mechanisms to provide control and improve their performance. These feedback mechanisms enable the motor to monitor and adjust its operation based on various parameters. Here are some commonly integrated feedback mechanisms in gear motors:
1. Encoder Feedback:
An encoder is a device that provides position and speed feedback by converting the motor’s mechanical motion into electrical signals. Encoders commonly used in gear motors include:
- Incremental Encoders: These encoders provide information about the motor’s shaft position and speed relative to a reference point. They generate pulses as the motor rotates, allowing precise measurement of position and speed changes.
- Absolute Encoders: Absolute encoders provide the precise position of the motor’s shaft within a full revolution. They do not require a reference point and provide accurate feedback even after power loss or motor restart.
2. Hall Effect Sensors:
Hall effect sensors use the principle of the Hall effect to detect the presence and strength of a magnetic field. They are commonly used in gear motors for speed and position sensing. Hall effect sensors provide feedback by detecting changes in the motor’s magnetic field and converting them into electrical signals.
3. Current Sensors:
Current sensors monitor the electrical current flowing through the motor’s windings. By measuring the current, these sensors provide feedback regarding the motor’s torque, load conditions, and power consumption. Current sensors are essential for motor control strategies such as current limiting, overcurrent protection, and closed-loop control.
4. Temperature Sensors:
Temperature sensors are integrated into gear motors to monitor the motor’s temperature. They provide feedback on the motor’s thermal conditions, allowing the control system to adjust the motor’s operation to prevent overheating. Temperature sensors are crucial for ensuring the motor’s reliability and preventing damage due to excessive heat.
5. Hall Effect Limit Switches:
Hall effect limit switches are used to detect the presence or absence of a magnetic field within a specific range. They are commonly employed as end-of-travel or limit switches in gear motors. Hall effect limit switches provide feedback to the control system, indicating when the motor has reached a specific position or when it has moved beyond the allowed range.
6. Resolver Feedback:
A resolver is an electromagnetic device used to determine the position and speed of a rotating shaft. It provides feedback by generating sine and cosine signals that correspond to the shaft’s angular position. Resolver feedback is commonly used in high-performance gear motors requiring accurate position and speed control.
These feedback mechanisms, when integrated into gear motors, enable precise control, monitoring, and adjustment of various motor parameters. By utilizing feedback signals from encoders, Hall effect sensors, current sensors, temperature sensors, limit switches, or resolvers, the control system can optimize the motor’s performance, ensure accurate positioning, maintain speed control, and protect the motor from excessive loads or overheating.

Can gear motors be used for precise positioning, and if so, what features enable this?
Yes, gear motors can be used for precise positioning in various applications. The combination of gear mechanisms and motor control features enables gear motors to achieve accurate and repeatable positioning. Here’s a detailed explanation of the features that enable gear motors to be used for precise positioning:
1. Gear Reduction:
One of the key features of gear motors is their ability to provide gear reduction. Gear reduction refers to the process of reducing the output speed of the motor while increasing the torque. By using the appropriate gear ratio, gear motors can achieve finer control over the rotational movement, allowing for more precise positioning. The gear reduction mechanism enables the motor to rotate at a slower speed while maintaining higher torque, resulting in improved accuracy and control.
2. High Resolution Encoders:
Many gear motors are equipped with high-resolution encoders. An encoder is a device that measures the position and speed of the motor shaft. High-resolution encoders provide precise feedback on the motor’s rotational position, allowing for accurate position control. The encoder signals are used in conjunction with motor control algorithms to ensure precise positioning by monitoring and adjusting the motor’s movement in real-time. The use of high-resolution encoders greatly enhances the gear motor’s ability to achieve precise and repeatable positioning.
3. Closed-Loop Control:
Gear motors with closed-loop control systems offer enhanced positioning capabilities. Closed-loop control involves continuously comparing the actual motor position (as measured by the encoder) with the desired position and making adjustments to minimize any position error. The closed-loop control system uses feedback from the encoder to adjust the motor’s speed, direction, and torque, ensuring accurate positioning even in the presence of external disturbances or variations in the load. Closed-loop control enables gear motors to actively correct for position errors and maintain precise positioning over time.
4. Stepper Motors:
Stepper motors are a type of gear motor that provides excellent precision and control for positioning applications. Stepper motors operate by converting electrical pulses into incremental steps of movement. Each step corresponds to a specific angular displacement, allowing precise positioning control. Stepper motors offer high step resolution, allowing for fine position adjustments. They are commonly used in applications that require precise positioning, such as robotics, 3D printers, and CNC machines.
5. Servo Motors:
Servo motors are another type of gear motor that excels in precise positioning tasks. Servo motors combine a motor, a feedback device (such as an encoder), and a closed-loop control system. They offer high torque, high speed, and excellent positional accuracy. Servo motors are capable of dynamically adjusting their speed and torque to maintain the desired position accurately. They are widely used in applications that require precise and responsive positioning, such as industrial automation, robotics, and camera pan-tilt systems.
6. Motion Control Algorithms:
Advanced motion control algorithms play a crucial role in enabling gear motors to achieve precise positioning. These algorithms, implemented in motor control systems or dedicated motion controllers, optimize the motor’s behavior to ensure accurate positioning. They take into account factors such as acceleration, deceleration, velocity profiling, and jerk control to achieve smooth and precise movements. Motion control algorithms enhance the gear motor’s ability to start, stop, and position accurately, reducing position errors and overshoot.
By leveraging gear reduction, high-resolution encoders, closed-loop control, stepper motors, servo motors, and motion control algorithms, gear motors can be effectively used for precise positioning in various applications. These features enable gear motors to achieve accurate and repeatable positioning, making them suitable for tasks that require precise control and reliable positioning performance.

What are the different types of gears used in gear motors, and how do they impact performance?
Various types of gears are used in gear motors, each with its unique characteristics and impact on performance. The choice of gear type depends on the specific requirements of the application, including torque, speed, efficiency, noise level, and space constraints. Here’s a detailed explanation of the different types of gears used in gear motors and their impact on performance:
1. Spur Gears:
Spur gears are the most common type of gears used in gear motors. They have straight teeth that are parallel to the gear’s axis and mesh with another spur gear to transmit power. Spur gears provide high efficiency, reliable operation, and cost-effectiveness. However, they can generate significant noise due to the meshing of teeth, and they may produce axial thrust forces. Spur gears are suitable for applications that require high torque transmission and moderate to high rotational speeds.
2. Helical Gears:
Helical gears have angled teeth that are cut at an angle to the gear’s axis. This helical tooth configuration enables gradual engagement and smoother tooth contact, resulting in reduced noise and vibration compared to spur gears. Helical gears provide higher load-carrying capacity and are suitable for applications that require high torque transmission and moderate to high rotational speeds. They are commonly used in gear motors where low noise operation is desired, such as in automotive applications and industrial machinery.
3. Bevel Gears:
Bevel gears have teeth that are cut on a conical surface. They are used to transmit power between intersecting shafts, usually at right angles. Bevel gears can have straight teeth (straight bevel gears) or curved teeth (spiral bevel gears). These gears provide efficient power transmission and precise motion control in applications where shafts need to change direction. Bevel gears are commonly used in gear motors for applications such as steering systems, machine tools, and printing presses.
4. Worm Gears:
Worm gears consist of a worm (a type of screw) and a mating gear called a worm wheel or worm gear. The worm has a helical thread that meshes with the worm wheel, resulting in a compact and high gear reduction ratio. Worm gears provide high torque transmission, low noise operation, and self-locking properties, which prevent reverse motion. They are commonly used in gear motors for applications that require high gear reduction and locking capabilities, such as in lifting mechanisms, conveyor systems, and machine tools.
5. Planetary Gears:
Planetary gears, also known as epicyclic gears, consist of a central sun gear, multiple planet gears, and an outer ring gear. The planet gears mesh with both the sun gear and the ring gear, creating a compact and efficient gear system. Planetary gears offer high torque transmission, high gear reduction ratios, and excellent load distribution. They are commonly used in gear motors for applications that require high torque and compact size, such as in robotics, automotive transmissions, and industrial machinery.
6. Rack and Pinion:
Rack and pinion gears consist of a linear rack (a straight toothed bar) and a pinion gear (a spur gear with a small diameter). The pinion gear meshes with the rack to convert rotary motion into linear motion or vice versa. Rack and pinion gears provide precise linear motion control and are commonly used in gear motors for applications such as linear actuators, CNC machines, and steering systems.
The choice of gear type in a gear motor depends on factors such as the desired torque, speed, efficiency, noise level, and space constraints. Each type of gear offers specific advantages and impacts the performance of the gear motor differently. By selecting the appropriate gear type, gear motors can be optimized for their intended applications, ensuring efficient and reliable power transmission.
editor by CX 2024-04-03
China Original Track Drive Planetary Gearbox Motor for Rotary Drilling Rig Xr130e dc motor
Merchandise Description
Characteristics
Origin Equipment VC, VD Series Final Generate Motor(Monitor Motor) , As Developed-in large-reduced Switching Variable Pace Running Gear, Present Effective Output Torque, Outstanding Controllability and Large Dependability.
Host Manufacturer First Offer Channel Enjoy Official Warranty but Aggressive Expense in Origin Machinery.
Software for Construction & Foundation Gear like Excavator,Drill Rig and so on.
Specifics
Characteristic
one) a hundred% Host Machine Brand Supply Channel
2) Take pleasure in Formal Warranty Plan
three)Provide a Assortment of Features to Fulfill Buyer Needs
-Created-in automated shifting perform
-Built-in mechanical brake purpose
-Anti-shock perform when starting up and stopping
3) Reducer With Prolonged Support Existence
4) Assure Our Consumer Could Ideal Match Up
Technical specs
| Product | Journey System | Hydraulic Motor | Software excess weight | ||||||
| Equipment ratio(I) | Max. Output torque | Max. Output speed | Min. Displacement |
Max. Displacement |
Max. Pace | Rated force | Brake torque | ||
| – | N-m | rpm | cm3/rev | cmthree/rev | rpm | MPa | N-m | Ton | |
| TM07VC | 53.71 | 8,340 | sixty | 34 | 55.8 | 3,900 | 34.3 | a hundred | five~seven |
| DM09VD | forty five.97 | 10,790 | sixty | 34 | fifty five.8 | 3,900 | 34.three | a hundred and fifty | 7~eight |
| TM10VD | 54.forty seven | 12,250 | 70 | 34 | fifty five.eight | 3,900 | 34.three | one hundred ten | 8~ten |
| TM18VC | fifty three | 18,one hundred forty | 60 | 54 | 86 | three,200 | 34.three | 193 | twelve~14 |
| TM22VC | fifty three.71 | 23,340 | 60 | 54 | 86 | three,three hundred | 34.3 | 290 | fourteen~sixteen |
| TM30VD | 39.14 | 34,200 | fifty six | 110 | 158 | two,800 | 34.3 | 490 | 15~18 |
| TM40VD | forty nine.95 | 45,610 | sixty | 119 | one hundred seventy five | two,800 | 34.three | 490 | 20~26 |
| TM60VD | 46.twelve | sixty eight,640 | fifty two | 221 | 280 | 2,400 | 34.three | 870 | 30~34 |
| TM70VD | fifty four.forty seven | seventy eight,400 | 45 | 221 | 280 | two,four hundred | 34.3 | 870 | 36~42 |
Stock
In Origin Machinery warehouse, from TM07 to TM70 sequence ultimate generate motors, We have preserved an inventory price of much more than 5 million US dollars to guarantee a rapid source speed. We encounter the aftermarket of host equipment brand dealers and other spare elements that have wholesale requirements, 100% First equipment and the most aggressive charges, that is why you need to decide on us.You ought to have the best.
Apps
|
US $1,000-5,000 / Piece | |
2 Pieces (Min. Order) |
###
| After-sales Service: | Yes |
|---|---|
| Warranty: | 1 Year |
| Type: | Motor |
| Application: | Excavator |
| Certification: | CE, ISO9001: 2000 |
| Condition: | New |
###
| Customization: |
Available
|
|---|
###
| Model | Travel Device | Hydraulic Motor | Application weight | ||||||
| Gear ratio(I) | Max. Output torque | Max. Output speed | Min. Displacement |
Max. Displacement |
Max. Speed | Rated pressure | Brake torque | ||
| – | N-m | rpm | cm3/rev | cm3/rev | rpm | MPa | N-m | Ton | |
| TM07VC | 53.71 | 8,340 | 60 | 34 | 55.8 | 3,900 | 34.3 | 100 | 5~7 |
| DM09VD | 45.97 | 10,790 | 60 | 34 | 55.8 | 3,900 | 34.3 | 150 | 7~8 |
| TM10VD | 54.47 | 12,250 | 70 | 34 | 55.8 | 3,900 | 34.3 | 110 | 8~10 |
| TM18VC | 53 | 18,140 | 60 | 54 | 86 | 3,200 | 34.3 | 193 | 12~14 |
| TM22VC | 53.71 | 23,340 | 60 | 54 | 86 | 3,300 | 34.3 | 290 | 14~16 |
| TM30VD | 39.14 | 34,200 | 56 | 110 | 158 | 2,800 | 34.3 | 490 | 15~18 |
| TM40VD | 49.95 | 45,610 | 60 | 119 | 175 | 2,800 | 34.3 | 490 | 20~26 |
| TM60VD | 46.12 | 68,640 | 52 | 221 | 280 | 2,400 | 34.3 | 870 | 30~34 |
| TM70VD | 54.47 | 78,400 | 45 | 221 | 280 | 2,400 | 34.3 | 870 | 36~42 |
|
US $1,000-5,000 / Piece | |
2 Pieces (Min. Order) |
###
| After-sales Service: | Yes |
|---|---|
| Warranty: | 1 Year |
| Type: | Motor |
| Application: | Excavator |
| Certification: | CE, ISO9001: 2000 |
| Condition: | New |
###
| Customization: |
Available
|
|---|
###
| Model | Travel Device | Hydraulic Motor | Application weight | ||||||
| Gear ratio(I) | Max. Output torque | Max. Output speed | Min. Displacement |
Max. Displacement |
Max. Speed | Rated pressure | Brake torque | ||
| – | N-m | rpm | cm3/rev | cm3/rev | rpm | MPa | N-m | Ton | |
| TM07VC | 53.71 | 8,340 | 60 | 34 | 55.8 | 3,900 | 34.3 | 100 | 5~7 |
| DM09VD | 45.97 | 10,790 | 60 | 34 | 55.8 | 3,900 | 34.3 | 150 | 7~8 |
| TM10VD | 54.47 | 12,250 | 70 | 34 | 55.8 | 3,900 | 34.3 | 110 | 8~10 |
| TM18VC | 53 | 18,140 | 60 | 54 | 86 | 3,200 | 34.3 | 193 | 12~14 |
| TM22VC | 53.71 | 23,340 | 60 | 54 | 86 | 3,300 | 34.3 | 290 | 14~16 |
| TM30VD | 39.14 | 34,200 | 56 | 110 | 158 | 2,800 | 34.3 | 490 | 15~18 |
| TM40VD | 49.95 | 45,610 | 60 | 119 | 175 | 2,800 | 34.3 | 490 | 20~26 |
| TM60VD | 46.12 | 68,640 | 52 | 221 | 280 | 2,400 | 34.3 | 870 | 30~34 |
| TM70VD | 54.47 | 78,400 | 45 | 221 | 280 | 2,400 | 34.3 | 870 | 36~42 |
Dynamic Modeling of a Planetary Motor
A planetary gear motor consists of a series of gears rotating in perfect synchrony, allowing them to deliver torque in a higher output capacity than a spur gear motor. Unlike the planetary motor, spur gear motors are simpler to build and cost less, but they are better for applications requiring lower torque output. That is because each gear carries the entire load. The following are some key differences between the two types of gearmotors.
planetary gear system
A planetary gear transmission is a type of gear mechanism that transfers torque from one source to another, usually a rotary motion. Moreover, this type of gear transmission requires dynamic modeling to investigate its durability and reliability. Previous studies included both uncoupled and coupled meshing models for the analysis of planetary gear transmission. The combined model considers both the shaft structural stiffness and the bearing support stiffness. In some applications, the flexible planetary gear may affect the dynamic response of the system.
In a planetary gear device, the axial end surface of the cylindrical portion is rotatable relative to the separating plate. This mechanism retains lubricant. It is also capable of preventing foreign particles from entering the planetary gear system. A planetary gear device is a great choice if your planetary motor’s speed is high. A high-quality planetary gear system can provide a superior performance than conventional systems.
A planetary gear system is a complex mechanism, involving three moving links that are connected to each other through joints. The sun gear acts as an input and the planet gears act as outputs. They rotate about their axes at a ratio determined by the number of teeth on each gear. The sun gear has 24 teeth, while the planet gears have three-quarters that ratio. This ratio makes a planetary motor extremely efficient.
planetary gear train
To predict the free vibration response of a planetary motor gear train, it is essential to develop a mathematical model for the system. Previously, static and dynamic models were used to study the behavior of planetary motor gear trains. In this study, a dynamic model was developed to investigate the effects of key design parameters on the vibratory response. Key parameters for planetary gear transmissions include the structure stiffness and mesh stiffness, and the mass and location of the shaft and bearing supports.
The design of the planetary motor gear train consists of several stages that can run with variable input speeds. The design of the gear train enables the transmission of high torques by dividing the load across multiple planetary gears. In addition, the planetary gear train has multiple teeth which mesh simultaneously in operation. This design also allows for higher efficiency and transmittable torque. Here are some other advantages of planetary motor gear trains. All these advantages make planetary motor gear trains one of the most popular types of planetary motors.
The compact footprint of planetary gears allows for excellent heat dissipation. High speeds and sustained performances will require lubrication. This lubricant can also reduce noise and vibration. But if these characteristics are not desirable for your application, you can choose a different gear type. Alternatively, if you want to maintain high performance, a planetary motor gear train will be the best choice. So, what are the advantages of planetary motor gears?
planetary gear train with fixed carrier train ratio
The planetary gear train is a common type of transmission in various machines. Its main advantages are high efficiency, compactness, large transmission ratio, and power-to-weight ratio. This type of gear train is a combination of spur gears, single-helical gears, and herringbone gears. Herringbone planetary gears have lower axial force and high load carrying capacity. Herringbone planetary gears are commonly used in heavy machinery and transmissions of large vehicles.
To use a planetary gear train with a fixed carrier train ratio, the first and second planets must be in a carrier position. The first planet is rotated so that its teeth mesh with the sun’s. The second planet, however, cannot rotate. It must be in a carrier position so that it can mesh with the sun. This requires a high degree of precision, so the planetary gear train is usually made of multiple sets. A little analysis will simplify this design.
The planetary gear train is made up of three components. The outer ring gear is supported by a ring gear. Each gear is positioned at a specific angle relative to one another. This allows the gears to rotate at a fixed rate while transferring the motion. This design is also popular in bicycles and other small vehicles. If the planetary gear train has several stages, multiple ring gears may be shared. A stationary ring gear is also used in pencil sharpener mechanisms. Planet gears are extended into cylindrical cutters. The ring gear is stationary and the planet gears rotate around a sun axis. In the case of this design, the outer ring gear will have a -3/2 planet gear ratio.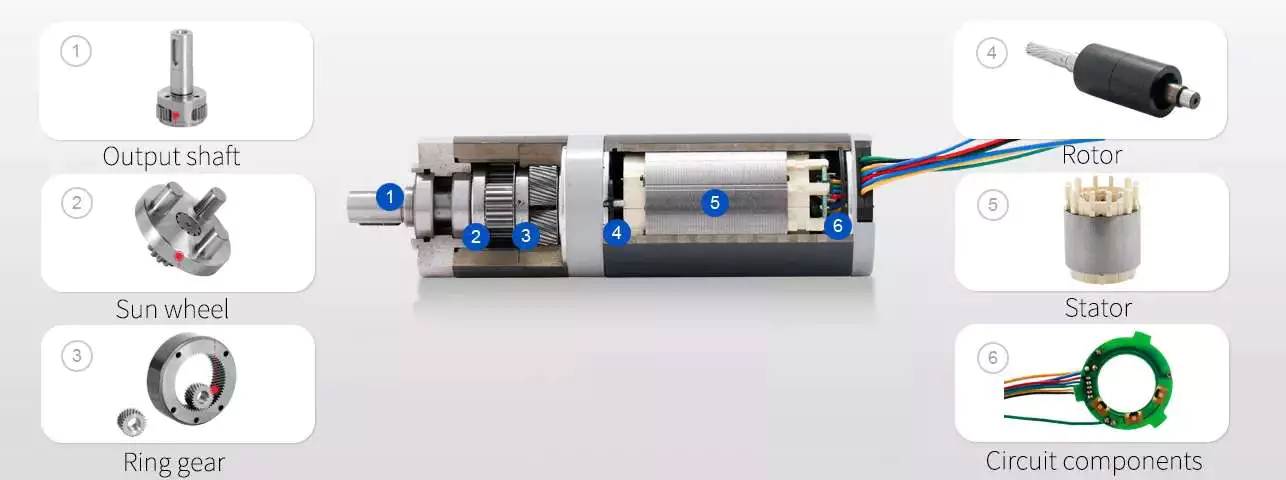
planetary gear train with zero helix angle
The torque distribution in a planetary gear is skewed, and this will drastically reduce the load carrying capacity of a needle bearing, and therefore the life of the bearing. To better understand how this can affect a gear train, we will examine two studies conducted on the load distribution of a planetary gear with a zero helix angle. The first study was done with a highly specialized program from the bearing manufacturer INA/FAG. The red line represents the load distribution along a needle roller in a zero helix gear, while the green line corresponds to the same distribution of loads in a 15 degree helix angle gear.
Another method for determining a gear’s helix angle is to consider the ratio of the sun and planet gears. While the sun gear is normally on the input side, the planet gears are on the output side. The sun gear is stationary. The two gears are in engagement with a ring gear that rotates 45 degrees clockwise. Both gears are attached to pins that support the planet gears. In the figure below, you can see the tangential and axial gear mesh forces on a planetary gear train.
Another method used for calculating power loss in a planetary gear train is the use of an auto transmission. This type of gear provides balanced performance in both power efficiency and load capacity. Despite the complexities, this method provides a more accurate analysis of how the helix angle affects power loss in a planetary gear train. If you’re interested in reducing the power loss of a planetary gear train, read on!
planetary gear train with spur gears
A planetary gearset is a type of mechanical drive system that uses spur gears that move in opposite directions within a plane. Spur gears are one of the more basic types of gears, as they don’t require any specialty cuts or angles to work. Instead, spur gears use a complex tooth shape to determine where the teeth will make contact. This in turn, will determine the amount of power, torque, and speed they can produce.
A two-stage planetary gear train with spur gears is also possible to run at variable input speeds. For such a setup, a mathematical model of the gear train is developed. Simulation of the dynamic behaviour highlights the non-stationary effects, and the results are in good agreement with the experimental data. As the ratio of spur gears to spur gears is not constant, it is called a dedendum.
A planetary gear train with spur gears is a type of epicyclic gear train. In this case, spur gears run between gears that contain both internal and external teeth. The circumferential motion of the spur gears is analogous to the rotation of planets in the solar system. There are four main components of a planetary gear train. The planet gear is positioned inside the sun gear and rotates to transfer motion to the sun gear. The planet gears are mounted on a joint carrier that is connected to the output shaft.
planetary gear train with helical gears
A planetary gear train with helical teeth is an extremely powerful transmission system that can provide high levels of power density. Helical gears are used to increase efficiency by providing a more efficient alternative to conventional worm gears. This type of transmission has the potential to improve the overall performance of a system, and its benefits extend far beyond the power density. But what makes this transmission system so appealing? What are the key factors to consider when designing this type of transmission system?
The most basic planetary train consists of the sun gear, planet gear, and ring gear elements. The number of planets varies, but the basic structure of planetary gears is similar. A simple planetary geartrain has the sun gear driving a carrier assembly. The number of planets can be as low as two or as high as six. A planetary gear train has a low mass inertia and is compact and reliable.
The mesh phase properties of a planetary gear train are particularly important in designing the profiles. Various parameters such as mesh phase difference and tooth profile modifications must be studied in depth in order to fully understand the dynamic characteristics of a PGT. These factors, together with others, determine the helical gears’ performance. It is therefore essential to understand the mesh phase of a planetary gear train to design it effectively.
editor by czh 2023-01-13