Product Description
PG36BL36 200kgf.cm bldc gear motor with planetary gearbox
1. Features of PG36BL36
Voltage:12V 24V
Speed: 0.8-2000rpm
Typical applications: Optical equipment, monitoring cameras, kind of finger-electric locks, automatic energy saving bath, water IC card, toys and gifts, office equipment, household appliances, automatic actuator
2. Specifications of PG36BL36
Note: It’s the typical specificaitoin for reference only, We can choose DC motor with different voltage speed to meet your torque and speed requirement.
Company Profile
1. About us
Business Type: Manufacturer, Trading Company Verified
Location: ZHangZhoug, China (Mainland) Verified
Main Products: dc motor,ac motor,gear motor,stepper motor,brushless motor
Total Employees: 51 – 100 People
Total Annual Revenue: $5 Million – $10 Million
Year Established: 2014 Verified
Top 3 Markets: Western Europe 20.00% North America 15.00% Domestic Market 12.00%
Product Certifications : CE, RoSH, RoSH CE
Trademarks : CHINAMFG
2. Production line
1)Production line
2) Product components
Packing&Delivery
Certifications
Customer Visits
FAQ
Q: What’s your main products?
A:We currently produce Brushed Dc Motors, Brushed Dc gear Motors, Planetary Dc Gear Motors, Brushless Dc Motors, Stepper motors and Ac Motors etc. You can check the specifications for above motors on our website and you can email us to recommend needed motors per your specification too.
Q:How to select a suitable motor?
A:If you have motor pictures or drawings to show us, or you have detailed specs like voltage, speed, torque, motor size, working mode of the motor, needed life time and noise level etc, please do not hesitate to let us know, then we can recommend suitable motor per your request accordingly.
Q: Do you have customized service for your standard motors?
A:Yes, we can customize per your request for the voltage, speed, torque and shaft size/shape. If you need additional wires/cables soldered on the terminal or need to add connectors, or capacitors or EMC we can make it too.
Q: you have individual design service for motors?
A:Yes, we would like to design motors individually for our customers, but it may need some mould charge and design charge.
Q:Can I have samples for testing first?
A:Yes, definitely you can. After confirmed the needed motor specs, we will quote and provide a proforma invoice for samples, once we get the payment, we will get a PASS from our account department to proceed samples accordingly.
Q:How do you make sure motor quality?
A:We have our own inspection procedures: for incoming materials, we have signed sample and drawing to make sure qualified incoming materials; for production process, we have tour inspection in the process and final inspection to make sure qualified products before shipping.
Q:What’s your lead time?
A:Generally speaking, our regular standard product will need 25-30days, a bit longer for customized products. But we are very flexible on the lead time, it will depends on the specific orders
Q:What’s your payment term?
A:For all our new customers, we will need 40% deposite, 60% paid before shipment.
Q:When will you reply after got my inquiries?
A:We will response within 24 hours once get your inquires.
Q:How can I trust you to make sure my money is safe?
A:We are certified by the third party SGS and we have exported to over 85 countries up to June.2017. You can check our reputation with our current customers in your country (if our customers do not mind), or you can order via alibaba to get trade assurance from alibaba to make sure your money is safe.
Q:What’s the minimum order quantity?
A:Our minimum order quantity depends on different motor models, please email us to check. Also, we usually do not accept personal use motor orders.
Q:What’s your shipping method for motors?
A:For samples and packages less than 100kg, we usually suggest express shipping; For heavy packages, we usually suggest air shipping or sea shipping. But it all depends on our customers’ needs.
Q:What certifications do you have?
A:We currently have CE and ROSH certifications.
Q:Can you send me your price list?
A:Since we have hundreds of different products, and price varies per different specifications, we are not able to offer a price list. But we can quote within 24 hours once got your inquirues to make sure you can get the price in time.
Q:Can I visit your company?
A:Yes, welcome to visit our company, but please let us know at least 2 weeks in advance to help us make sure no other meetings during the day you visit us. Thanks!
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Household Appliances, Finger-Electronic Locks, Toys and Gifts |
|---|---|
| Operating Speed: | Low Speed |
| Function: | Driving |
| Casing Protection: | Drip-Proof |
| Structure and Working Principle: | Brush |
| Certification: | Ce, RoHS |
| Samples: |
US$ 35/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
|
|
|---|

Where can individuals find reliable resources for learning more about gear motors and their applications?
Individuals seeking to learn more about gear motors and their applications have access to various reliable resources that provide valuable information and insights. Here are some sources where individuals can find reliable information about gear motors:
1. Manufacturer Websites:
Manufacturer websites are a primary source of information about gear motors. Gear motor manufacturers often provide detailed product specifications, application guides, technical documentation, and educational materials on their websites. These resources offer insights into different gear motor types, features, performance characteristics, and application considerations. Manufacturer websites are a reliable and convenient starting point for learning about gear motors.
2. Industry Associations and Organizations:
Industry associations and organizations related to mechanical engineering, automation, and motion control often have resources and publications dedicated to gear motors. These organizations provide technical articles, whitepapers, industry standards, and guidelines related to gear motor design, selection, and application. Examples of such associations include the American Gear Manufacturers Association (AGMA), International Electrotechnical Commission (IEC), and Institute of Electrical and Electronics Engineers (IEEE).
3. Technical Publications and Journals:
Technical publications and journals focused on engineering, robotics, and motion control are valuable sources of in-depth knowledge about gear motors. Publications like IEEE Transactions on Industrial Electronics, Mechanical Engineering magazine, or Motion System Design magazine often feature articles, case studies, and research papers on gear motor technology, advancements, and applications. These publications provide authoritative and up-to-date information from industry experts and researchers.
4. Online Forums and Communities:
Online forums and communities dedicated to engineering, robotics, and automation can be excellent resources for discussions, insights, and practical experiences related to gear motors. Websites like Stack Exchange, engineering-focused subreddits, or specialized forums provide platforms for individuals to ask questions, share knowledge, and engage in discussions with professionals and enthusiasts in the field. Participating in these communities allows individuals to learn from real-world experiences and gain practical insights.
5. Educational Institutions and Courses:
Technical colleges, universities, and vocational training centers often offer courses or programs in mechanical engineering, mechatronics, or automation that cover gear motor fundamentals and applications. These educational institutions provide comprehensive curricula, textbooks, and lecture materials that can serve as reliable resources for individuals interested in learning about gear motors. Additionally, online learning platforms like Coursera, Udemy, or LinkedIn Learning offer courses on topics related to gear motors and motion control.
6. Trade Shows and Exhibitions:
Attending trade shows, exhibitions, and industry conferences related to automation, robotics, or motion control provides opportunities to learn about the latest advancements in gear motor technology. These events often feature product demonstrations, technical presentations, and expert panels where individuals can interact with gear motor manufacturers, industry experts, and other professionals. It’s a great way to stay updated on the latest trends, innovations, and applications of gear motors.
When seeking reliable resources, it’s important to consider the credibility of the source, the expertise of the authors, and the relevance to the specific area of interest. By leveraging these resources, individuals can gain a comprehensive understanding of gear motors and their applications, from basic principles to advanced topics, enabling them to make informed decisions and effectively utilize gear motors in their projects or applications.
Can you explain the role of backlash in gear motors and how it’s managed in design?
Backlash plays a significant role in gear motors and is an important consideration in their design and operation. Backlash refers to the slight clearance or play between the teeth of gears in a gear system. It affects the precision, accuracy, and responsiveness of the gear motor. Here’s an explanation of the role of backlash in gear motors and how it is managed in design:
1. Role of Backlash:
Backlash in gear motors can have both positive and negative effects:
- Compensation for Misalignment: Backlash can help compensate for minor misalignments between gears, shafts, or the load. It allows a small amount of movement before engaging the next set of teeth, reducing the risk of damage due to misalignment. This can be particularly beneficial in applications where precise alignment is challenging or subject to variations.
- Negative Impact on Accuracy and Responsiveness: Backlash can introduce a delay or “dead zone” in the motion transmission. When changing the direction of rotation or reversing the load, the gear teeth must first overcome the clearance or play before engaging in the opposite direction. This delay can reduce the overall accuracy, responsiveness, and repeatability of the gear motor, especially in applications that require precise positioning or rapid changes in direction or speed.
2. Managing Backlash in Design:
Designers employ various techniques to manage and minimize backlash in gear motors:
- Tight Manufacturing Tolerances: Proper manufacturing techniques and tight tolerances can help minimize backlash. Precision machining and quality control during the production of gears and gear components ensure closer tolerances, reducing the amount of play between gear teeth.
- Preload or Pre-tensioning: Applying a preload or pre-tensioning force to the gear system can help reduce backlash. This technique involves introducing an initial force or tension that eliminates the clearance between gear teeth. It ensures immediate contact and engagement of the gear teeth, minimizing the dead zone and improving the overall responsiveness and accuracy of the gear motor.
- Anti-Backlash Gears: Anti-backlash gears are designed specifically to minimize or eliminate backlash. They typically feature modifications to the gear tooth profile, such as modified tooth shapes or special tooth arrangements, to reduce clearance. Anti-backlash gears can be used in gear motor designs to improve precision and minimize the effects of backlash.
- Backlash Compensation: In some cases, backlash compensation techniques can be employed. These techniques involve monitoring the position or movement of the load and applying control algorithms to compensate for the backlash. By accounting for the clearance and adjusting the control signals accordingly, the effects of backlash can be mitigated, improving accuracy and responsiveness.
3. Application-Specific Considerations:
The management of backlash in gear motors should be tailored to the specific application requirements:
- Positioning Accuracy: Applications that require precise positioning, such as robotics or CNC machines, may require tighter backlash control to ensure accurate and repeatable movements.
- Dynamic Response: Applications that involve rapid changes in direction or speed, such as high-speed automation or servo control systems, may require reduced backlash to maintain responsiveness and minimize overshoot or lag.
- Load Characteristics: The nature of the load and its impact on the gear system should be considered. Heavy loads or applications with significant inertial forces may require additional backlash management techniques to maintain stability and accuracy.
In summary, backlash in gear motors can affect precision, accuracy, and responsiveness. While it can compensate for misalignments, backlash may introduce delays and reduce the overall performance of the gear motor. Designers manage backlash through tight manufacturing tolerances, preload techniques, anti-backlash gears, and backlash compensation methods. The management of backlash depends on the specific application requirements, considering factors such as positioning accuracy, dynamic response, and load characteristics.
In which industries are gear motors commonly used, and what are their primary applications?
Gear motors find widespread use in various industries due to their versatility, reliability, and ability to provide controlled mechanical power. They are employed in a wide range of applications that require precise power transmission and speed control. Here’s a detailed explanation of the industries where gear motors are commonly used and their primary applications:
1. Robotics and Automation:
Gear motors play a crucial role in robotics and automation industries. They are used in robotic arms, conveyor systems, automated assembly lines, and other robotic applications. Gear motors provide the required torque, speed control, and directional control necessary for the precise movements and operations of robots. They enable accurate positioning, gripping, and manipulation tasks in industrial and commercial automation settings.
2. Automotive Industry:
The automotive industry extensively utilizes gear motors in various applications. They are used in power windows, windshield wipers, HVAC systems, seat adjustment mechanisms, and many other automotive components. Gear motors provide the necessary torque and speed control for these systems, enabling smooth and efficient operation. Additionally, gear motors are also utilized in electric and hybrid vehicles for powertrain applications.
3. Manufacturing and Machinery:
Gear motors find wide application in the manufacturing and machinery sector. They are used in conveyor belts, packaging equipment, material handling systems, industrial mixers, and other machinery. Gear motors provide reliable power transmission, precise speed control, and torque amplification, ensuring efficient and synchronized operation of various manufacturing processes and machinery.
4. HVAC and Building Systems:
In heating, ventilation, and air conditioning (HVAC) systems, gear motors are commonly used in damper actuators, control valves, and fan systems. They enable precise control of airflow, temperature, and pressure, contributing to energy efficiency and comfort in buildings. Gear motors also find applications in automatic doors, blinds, and gate systems, providing reliable and controlled movement.
5. Marine and Offshore Industry:
Gear motors are extensively used in the marine and offshore industry, particularly in propulsion systems, winches, and cranes. They provide the required torque and speed control for various marine operations, including steering, anchor handling, cargo handling, and positioning equipment. Gear motors in marine applications are designed to withstand harsh environments and provide reliable performance under demanding conditions.
6. Renewable Energy Systems:
The renewable energy sector, including wind turbines and solar tracking systems, relies on gear motors for efficient power generation. Gear motors are used to adjust the rotor angle and position in wind turbines, optimizing their performance in different wind conditions. In solar tracking systems, gear motors enable the precise movement and alignment of solar panels to maximize sunlight capture and energy production.
7. Medical and Healthcare:
Gear motors have applications in the medical and healthcare industry, including in medical equipment, laboratory devices, and patient care systems. They are used in devices such as infusion pumps, ventilators, surgical robots, and diagnostic equipment. Gear motors provide precise control and smooth operation, ensuring accurate dosing, controlled movements, and reliable functionality in critical medical applications.
These are just a few examples of the industries where gear motors are commonly used. Their versatility and ability to provide controlled mechanical power make them indispensable in numerous applications requiring torque amplification, speed control, directional control, and load distribution. The reliable and efficient power transmission offered by gear motors contributes to the smooth and precise operation of machinery and systems in various industries.


editor by CX 2024-04-12
China Standard CZPT 1.5kw 2kw 1500watt 48V 310 V Low Speed 38 30 21 15 Rpm 310nm High Torque DC Planetary Gearbox Reduction BLDC Motor wholesaler
Product Description
Product Description
Feature:
A. High power range from 75W to 15KW
B. Dia: 57mm-180mm
C. Easy for speed & direction adjustment
D. Rich stock and fast shipping time in 10 working days
E. Strong stability for driver/controller
F. Lifetime above continuous 10000 hours
G. IP65 protection rank is available for us
H. Above 90% enery efficiency motor is available
I. 3D file is available if customers needed
K.High-performance and stable matching driver and controller
Δ Kindly remind: As different customers may need different motor parameter for fitting your equipment. If below motor can’t fit your need, please kindly send inquiry to us with information for rated power or torque,rated speed, and rated voltage for our new size drawing making for you. CLICK HERE to contact me. Thanks a lot!
Dimensions (Unit: mm )
Mounting screws are included with gear head.
Gearbox Specification:
|
Gearbox Type |
PLF90/PLE90 |
ZPLF90/ZPLE90 |
||||
|
Deceleration stage |
1 |
2 |
3 |
1 |
2 |
3 |
|
Length |
153 |
176.5 |
199.5 |
187.5 |
222 |
245.5 |
|
Reduction ratio |
Level 1: 3, 4, 5, 7, 10 |
|||||
110mm 2000W BLDC motor with PLF120/PLE120 Planetary Gearbox
Other Motor Specification Form:
Δ Motor interface, Voltage, Speed can be customized.
For More Details Of Product Specifications,
Please Click here contact us for updated size drawing if you have other different parameter needed. Thanks
More Motor Flange Size
Δ More Motor Flange Size to choose, if you need other size. Welcome to contact us to custom.
BLDC Motor with Gearbox Range
Company Profile
DMKE motor was founded in China, HangZhou city,Xihu (West Lake) Dis. district, in 2009. After 12 years’ creativity and development, we became 1 of the leading high-tech companies in China in dc motor industry.
We specialize in high precision micro dc gear motors, brushless motors, brushless controllers, dc servo motors, dc servo controllers etc. And we produce brushless dc motor and controller with wide power range from 5 watt to 20 kilowatt; also dc servo motor power range from 50 watt to 10 kilowatt. They are widely used in automatic guided vehicle , robots, lifting equipment,cleaning machine, medical equipment, packing machinery, and many other industrial automatic equipments.
With a plant area of 4000 square meters, we have built our own supply chain with high quality control standard and passed ISO9001 certificate of quality system.
With more than 10 engineers for brushless dc motor and controllers’ research and development, we own strong independent design and development capability. Custom-made motors and controllers are widely accepted by us. At the same time, we have engineers who can speak fluent English. That makes we can supply intime after-sales support and guidance smoothly for our customers.
Our motors are exported worldwide, and over 80% motors are exported to Europe, the United States, Saudi Arabia, Australia, Korea etc. We are looking forward to establishing long-term business relationship together with you for mutual business success.
FAQ
Q1: What kind motors you can provide?
A1: For now, we mainly provide permanent magnet brushless dc motor, dc gear motor, micro dc motor, planetary gear motor, dc servo motor, brush dc motors, with diameter range from 16 to 220mm,and power range from 5W to 20KW.
Q2: Is there a MOQ for your motors?
A2: No. we can accept 1 pcs for sample making for your testing,and the price for sample making will have 10% to 30% difference than bulk price based on different style.
Q3: Could you send me a price list?
A3: For all of our motors, they are customized based on different requirements like power, voltage, gear ratio, rated torque and shaft diameter etc. The price also varies according to different order qty. So it’s difficult for us to provide a price list.
If you can share your detailed specification and order qty, we’ll see what offer we can provide.
Q4: Are you motors reversible?
A4: Yes, nearly all dc and ac motor are reversible. We have technical people who can teach how to get the function by different wire connection.
Q5: Is it possible for you to develop new motors if we provide the tooling cost?
A5: Yes. Please kindly share the detailed requirements like performance, size, annual quantity, target price etc. Then we’ll make our evaluation to see if we can arrange or not.
Q6:How about your delivery time?
A6: For micro brush dc gear motor, the sample delivery time is 2-5 days, bulk delivery time is about 15-20 days, depends on the order qty.
For brushless dc motor, the sample deliver time is about 10-15 days; bulk time is 15-20 days.
Pleasecontact us for final reference.
Q7:What’s your warranty terms?
A6: One year
| Application: | Universal, Industrial, Household Appliances, Power Tools, Pump |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Compound |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Samples: |
US$ 401.3/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|

Benefits of a Planetary Motor
Besides being one of the most efficient forms of a drive, a Planetary Motor also offers a great number of other benefits. These features enable it to create a vast range of gear reductions, as well as generate higher torques and torque density. Let’s take a closer look at the benefits this mechanism has to offer. To understand what makes it so appealing, we’ll explore the different types of planetary systems.
Solar gear
The solar gear on a planetary motor has two distinct advantages. It produces less noise and heat than a helical gear. Its compact footprint also minimizes noise. It can operate at high speeds without sacrificing efficiency. However, it must be maintained with constant care to operate efficiently. Solar gears can be easily damaged by water and other debris. Solar gears on planetary motors may need to be replaced over time.
A planetary gearbox is composed of a sun gear and two or more planetary ring and spur gears. The sun gear is the primary gear and is driven by the input shaft. The other two gears mesh with the sun gear and engage the stationary ring gear. The three gears are held together by a carrier, which sets the spacing. The output shaft then turns the planetary gears. This creates an output shaft that rotates.
Another advantage of planetary gears is that they can transfer higher torques while being compact. These advantages have led to the creation of solar gears. They can reduce the amount of energy consumed and produce more power. They also provide a longer service life. They are an excellent choice for solar-powered vehicles. But they must be installed by a certified solar energy company. And there are other advantages as well. When you install a solar gear on a planetary motor, the energy produced by the sun will be converted to useful energy.
A solar gear on a planetary motor uses a solar gear to transmit torque from the sun to the planet. This system works on the principle that the sun gear rotates at the same rate as the planet gears. The sun gear has a common design modulus of -Ns/Np. Hence, a 24-tooth sun gear equals a 3-1/2 planet gear ratio. When you consider the efficiency of solar gears on planetary motors, you will be able to determine whether the solar gears are more efficient.
Sun gear
The mechanical arrangement of a planetary motor comprises of two components: a ring gear and a sun gear. The ring gear is fixed to the motor’s output shaft, while the sun gear rolls around and orbits around it. The ring gear and sun gear are linked by a planetary carrier, and the torque they produce is distributed across their teeth. The planetary structure arrangement also reduces backlash, and is critical to achieve a quick start and stop cycle.
When the two planetary gears rotate independently, the sun gear will rotate counterclockwise and the ring-gear will turn in the same direction. The ring-gear assembly is mounted in a carrier. The carrier gear and sun gear are connected to each other by a shaft. The planetary gears and sun gear rotate around each other on the ring-gear carrier to reduce the speed of the output shaft. The planetary gear system can be multiplied or staged to obtain a higher reduction ratio.
A planetary gear motor mimics the planetary rotation system. The input shaft turns a central gear, known as the sun gear, while the planetary gears rotate around a stationary sun gear. The motor’s compact design allows it to be easily mounted to a vehicle, and its low weight makes it ideal for small vehicles. In addition to being highly efficient, a planetary gear motor also offers many other benefits.
A planetary gearbox uses a sun gear to provide torque to the other gears. The planet pinions mesh with an internal tooth ring gear to generate rotation. The carrier also acts as a hub between the input gear and output shaft. The output shaft combines these two components, giving a higher torque. There are three types of planetary gearboxes: the sun gear and a wheel drive planetary gearbox.
Planetary gear
A planetary motor gear works by distributing rotational force along a separating plate and a cylindrical shaft. A shock-absorbing device is included between the separating plate and cylindrical shaft. This depressed portion prevents abrasion wear and foreign particles from entering the device. The separating plate and shaft are positioned coaxially. In this arrangement, the input shaft and output shaft are rotated relative to one another. The rotatable disc absorbs the impact.
Another benefit of a planetary motor gear is its efficiency. Planetary motor gears are highly efficient at transferring power, with 97% of the input energy being transferred to the output. They can also have high gear ratios, and offer low noise and backlash. This design also allows the planetary gearbox to work with electric motors. In addition, planetary gears also have a long service life. The efficiency of planetary gears is due in part to the large number of teeth.
Other benefits of a planetary motor gear include the ease of changing ratios, as well as the reduced safety stock. Unlike other gears, planetary gears don’t require special tools for changing ratios. They are used in numerous industries, and share parts across multiple sizes. This means that they are cost-effective to produce and require less safety stock. They can withstand high shock and wear, and are also compact. If you’re looking for a planetary motor gear, you’ve come to the right place.
The axial end surface of a planetary gear can be worn down by abrasion with a separating plate. In addition, foreign particles may enter the planetary gear device. These particles can damage the gears or even cause noise. As a result, you should check planetary gears for damage and wear. If you’re looking for a gear, make sure it has been thoroughly tested and installed by a professional.
Planetary gearbox
A planetary motor and gearbox are a common combination of electric and mechanical power sources. They share the load of rotation between multiple gear teeth to increase the torque capacity. This design is also more rigid, with low backlash that can be as low as one or two arc minutes. The advantages of a planetary gearmotor over a conventional electric motor include compact size, high efficiency, and less risk of gear failure. Planetary gear motors are also more reliable and durable than conventional electric motors.
A planetary gearbox is designed for a single stage of reduction, or a multiple-stage unit can be built with several individual cartridges. Gear ratios may also be selected according to user preference, either to face mount the output stage or to use a 5mm hex shaft. For multi-stage planetary gearboxes, there are a variety of different options available. These include high-efficiency planetary gearboxes that achieve a 98% efficiency at single reduction. In addition, they are noiseless, and reduce heat loss.
A planetary gearbox may be used to increase torque in a robot or other automated system. There are different types of planetary gear sets available, including gearboxes with sliding or rolling sections. When choosing a planetary gearset, consider the environment and other factors such as backlash, torque, and ratio. There are many advantages to a planetary gearbox and the benefits and drawbacks associated with it.
Planetary gearboxes are similar to those in a solar system. They feature a central sun gear in the middle, two or more outer gears, and a ring gear at the output. The planetary gears rotate in a ring-like structure around a stationary sun gear. When the gears are engaged, they are connected by a carrier that is fixed to the machine’s shaft.
Planetary gear motor
Planetary gear motors reduce the rotational speed of an armature by one or more times. The reduction ratio depends on the structure of the planetary gear device. The planetary gear device has an output shaft and an armature shaft. A separating plate separates the two. The output shaft moves in a circular pattern to turn the pinion 3. When the pinion rotates to the engagement position, it is engaged with the ring gear 4. The ring gear then transmits the rotational torque to the armature shaft. The result is that the engine cranks up.
Planetary gear motors are cylindrical in shape and are available in various power levels. They are typically made of steel or brass and contain multiple gears that share the load. These motors can handle massive power transfers. The planetary gear drive, on the other hand, requires more components, such as a sun’s gear and multiple planetary gears. Consequently, it may not be suitable for all types of applications. Therefore, the planetary gear drive is generally used for more complex machines.
Brush dusts from the electric motor may enter the planetary gear device and cause it to malfunction. In addition, abrasion wear on the separating plate can affect the gear engagement of the planetary gear device. If this occurs, the gears will not engage properly and may make noise. In order to prevent such a situation from occurring, it is important to regularly inspect planetary gear motors and their abrasion-resistant separating plates.
Planetary gear motors come in many different power levels and sizes. These motors are usually cylindrical in shape and are made of steel, brass, plastic, or a combination of both materials. A planetary gear motor can be used in applications where space is an issue. This motor also allows for low gearings in small spaces. The planetary gearing allows for large amounts of power transfer. The output shaft size is dependent on the gear ratio and the motor speed.
editor by CX 2023-06-09
China best High Torque BLDC Planetary Gearbox DC Gear Motor car motor
Product Description
Product Description
| model | Number of poles | Phase | Rated voltage | Rated speed | Continuous locked-rotor torque | Rated torque | Rated power | Peak torque |
| Units | VDC | RPM | N.m | N.m | W | N.m | ||
| 42BYA075B030C-02 | 4 | 3 | 24 | 3000 | 0.192 | 0.16 | 50 | 0.48 |
| model | Peak current | Torque constant | Back EMF | Motor length | Motor length | voltage range | Range of rotation | weight |
| Units | A | Nm/A | V/KRPM | g.cMoment of inertia | mm | VDC | RPM | Kg |
| 42BYA075B030C-02 | 9.6 | 0.05 | 3.947 | 14.6 | 134 | 24~48 | 1000~3000 | 1.0 |
Product Parameters
Quiet stable and reliable for long life operation
1.Voltage: 24 VDC
2.Number of phases: 3
3.Number of levels: 4
4.Line-to-line resistance: 1.45±10%ohms
5.Line-to-line inductance: 1.27±20%mH
6.Rated current: 3.2A
7.Rated power: 50W
8.No-load speed: 4300 rpm
9.Insulation class: B
10.Reduction ratio: 1:58.22
11.Output torque: 7.5 N.m
12.Output speed: 51.5 rpm
13.We can design the special voltage and shaft and so on
| Application: | Industrial |
|---|---|
| Speed: | High Speed |
| Number of Stator: | Three-Phase |
| Function: | Driving, Control |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Samples: |
US$ 162/Piece
1 Piece(Min.Order) | |
|---|
How to Select a Gear Motor
A gearmotor is an electrical machine that transfers energy from one place to another. There are many types of gearmotors. This article will discuss the types of gearmotors, including Angular geared motors, Planetary gearboxes, Hydraulic gear motors, and Croise motors. In addition to its uses, gearmotors have many different characteristics. In addition, each type has distinct advantages and disadvantages. Listed below are a few tips on selecting a gearmotor.
Angular geared motors
Angular geared motors are the optimum drive element for applications where torques, forces, and motions need to be transferred at an angle. Compared to other types of geared motors, these have few moving parts, a compact design, and a long life. Angular geared motors are also highly efficient in travel drive applications. In addition to their durability, they have a low maintenance requirement and are highly corrosion-resistant.
Helical worm geared motors are a low-cost solution for drives that employ angular geared motors. They combine a worm gear stage and helical input stage to offer higher efficiency than pure worm geared motors. This drive solution is highly reliable and noise-free. Angular geared motors are often used in applications where noise is an issue, and helical worm geared motors are particularly quiet.
The gear ratio of an angular geared motor depends on the ratio between its input and output shaft. A high-quality helical geared motor has a relatively low mechanical noise level, and can be installed in almost any space. The torque of a helical geared motor can be measured by using frequency measurement equipment. The energy efficiency of angular geared motors is one of the most important factors when choosing a motor. Its symmetrical arrangement also allows it to operate in low-speed environments.
When selecting the right angular geared motor, it is important to keep in mind that increased torque will lead to poor output performance. Once a gear motor reaches its stall torque, it will no longer function properly. This makes it important to consult a performance curve to choose the appropriate motor. Most DC motor manufacturers are more than happy to provide these to customers upon request. Angular geared motors are more expensive than conventional worm gear motors.
Planetary gearboxes
Planetary gearboxes are used in industrial machinery to generate higher torque and power density. There are three main types of planetary gearboxes: double stage, triple stage, and multistage. The central sun gear transfers torque to a group of planetary gears, while the outer ring and spindle provide drive to the motor. The design of planetary gearboxes delivers up to 97% of the power input.
The compact size of planetary gears results in excellent heat dissipation. In some applications, lubrication is necessary to improve durability. Nevertheless, if you are looking for high speed transmission, you should consider the additional features, such as low noise, corrosion resistance, and construction. Some constructors are better than others. Some are quick to respond, while others are unable to ship their products in a timely fashion.
The main benefit of a planetary gearbox is its compact design. Its lightweight design makes it easy to install, and the efficiency of planetary gearboxes is up to 0.98%. Another benefit of planetary gearboxes is their high torque capacity. These gearboxes are also able to work in applications with limited space. Most modern automatic transmissions in the automotive industry use planetary gears.
In addition to being low in cost, planetary gearboxes are a great choice for many applications. Neugart offers both compact and right angle versions. The right angle design offers a high power-to-weight ratio, making it ideal for applications where torque is needed to be transmitted in reverse mode. So if you’re looking for an efficient way to move heavy machinery around, planetary gearboxes can be a great choice.
Another advantage of planetary gearboxes is their ability to be easily and rapidly changed from one application to another. Since planetary gears are designed to be flexible, you don’t have to buy new ones if you need to change gear ratios. You can also use planetary gears in different industries and save on safety stock by sharing common parts. These gears are able to withstand high shock loads and demanding conditions.
Hydraulic gear motors
Hydraulic gear motors are driven by oil that is pumped into a gear box and causes the gears to rotate. This method of energy production is quiet and inexpensive. The main drawbacks of hydraulic gear motors are that they are noisy and inefficient at low speeds. The other two types of hydraulic motors are piston and vane-type hydraulic motors. The following are some common benefits of hydraulic gear motors.
A hydraulic gear motor is composed of two gears – a driven gear and an idler. The driven gear is attached to the output shaft via a key. High-pressure oil flows into the housing between the gear tips and the motor housing, and the oil then exits through an outlet port. Unlike a conventional gear motor, the gears mesh to prevent the oil from flowing backward. As a result, they are an excellent choice for agricultural and industrial applications.
The most common hydraulic gear motors feature a gerotor and a drive gear. These gears mesh with a larger gear to produce rotation. There are also three basic variations of gear motors: roller-gerotor, gerotor, and differential. The latter produces higher torque and less friction than the previous two. These differences make it difficult to choose which type is the best for your needs. A high-performance gear motor will last longer than an ordinary one.
Radial piston hydraulic motors operate in the opposite direction to the reciprocating shaft of an electric gearmotor. They have nine pistons arranged around a common center line. Fluid pressure causes the pistons to reciprocate, and when they are stationary, the pistons push the fluid out and move back in. Because of the high pressure created by the fluid, they can rotate at speeds up to 25,000RPM. In addition, hydraulic gear motors are highly efficient, allowing them to be used in a wide range of industrial and commercial applications.
Hydraulic gear motors complement hydraulic pumps and motors. They are also available in reversible models. To choose the right hydraulic motor for your project, take time to gather all the necessary information about the installation process. Some types require specialized expertise or complicated installation. Also, there are some differences between closed and open-loop hydraulic motors. Make sure to discuss the options with a professional before you make a decision.
Croise motors
There are many advantages to choosing a Croise gear motor. It is highly compact, with less weight and space than standard motors. Its right-angle shaft and worm gear provide smooth, quiet operation. A silent-type brake ensures no metallic sound during operation. It also offers excellent positioning accuracy and shock resistance. This is why this motor is ideal for high-frequency applications. Let’s take a closer look.
A properly matched gearmotor will provide maximum torque output in a specified period. Its maximum developing torque is typically the rated output torque. A one-twelfth-horsepower (1/8 horsepower) motor can meet torque requirements of six inch-pounds, without exceeding its breakdown rating. This lower-cost unit allows for production variations and allows the customer to use a less powerful motor. Croise gear motors are available in a variety of styles.
editor by CX 2023-05-26
China high quality High Torque BLDC Planetary Gearbox DC Gear Motor with Hot selling
Product Description
Product Description
| model | Number of poles | Phase | Rated voltage | Rated speed | Continuous locked-rotor torque | Rated torque | Rated power | Peak torque |
| Units | VDC | RPM | N.m | N.m | W | N.m | ||
| 42BYA075B030C-02 | 4 | 3 | 24 | 3000 | 0.192 | 0.16 | 50 | 0.48 |
| model | Peak current | Torque constant | Back EMF | Motor length | Motor length | voltage range | Range of rotation | weight |
| Units | A | Nm/A | V/KRPM | g.cMoment of inertia | mm | VDC | RPM | Kg |
| 42BYA075B030C-02 | 9.6 | 0.05 | 3.947 | 14.6 | 134 | 24~48 | 1000~3000 | 1.0 |
Product Parameters
Quiet stable and reliable for long life operation
1.Voltage: 24 VDC
2.Number of phases: 3
3.Number of levels: 4
4.Line-to-line resistance: 1.45±10%ohms
5.Line-to-line inductance: 1.27±20%mH
6.Rated current: 3.2A
7.Rated power: 50W
8.No-load speed: 4300 rpm
9.Insulation class: B
10.Reduction ratio: 1:58.22
11.Output torque: 7.5 N.m
12.Output speed: 51.5 rpm
13.We can design the special voltage and shaft and so on
| Application: | Industrial |
|---|---|
| Speed: | High Speed |
| Number of Stator: | Three-Phase |
| Function: | Driving, Control |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Samples: |
US$ 162/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|

How to Assemble a Planetary Motor
A Planetary Motor uses multiple planetary surfaces to produce torque and rotational speed. The planetary system allows for a wide range of gear reductions. Planetary systems are particularly effective in applications where higher torques and torque density are needed. As such, they are a popular choice for electric vehicles and other applications where high-speed mobility is required. Nevertheless, there are many benefits associated with using a planetary motor. Read on to learn more about these motors.
VPLite
If you’re looking to replace the original VP, the VPLite has a similar output shaft as the original. This means that you can mix and match your original gear sets, including the input and output shafts. You can even mix metal inputs with plastic outputs. Moreover, if you decide to replace the gearbox, you can easily disassemble the entire unit and replace it with a new one without losing any output torque.
Compared to a planetary motor, a spur gear motor uses fewer gears and is therefore cheaper to produce. However, the latter isn’t suitable for high-torque applications. The torque produced by a planetary gearmotor is evenly distributed, which makes it ideal for applications that require higher torque. However, you may have to compromise on the torque output if you’re looking for a lightweight option.
The VersaPlanetary Lite gearbox replaces the aluminum ring gear with a 30% glass-filled nylon gear. This gearbox is available in two sizes, which means you can mix and match parts to get a better gear ratio. The VPLite gearbox also has a female 5mm hex output shaft. You can mix and match different gearboxes and planetary gearboxes for maximum efficiency.
VersaPlanetary
The VersaPlanetary is a highly versatile planetary motor that can be mounted in a variety of ways. Its unique design includes a removable shaft coupler system that makes it simple to swap out the motor with another. This planetary motor mounts in any position where a CIM motor mounts. Here’s how to assemble the motor. First, remove the hex output shaft from the VersaPlanetary output stage. Its single ring clip holds it in place. You can use a drill press to drill a hole into the output shaft.
After mounting the gearbox, you can then mount the motor. The mounting hardware included with the VersaPlanetary Planetary Motor comes with four 10-32 threaded holes on a two-inch bolt circle. You can use these holes to mount your VersaPlanetary on a CIM motor or a CIM-compatible motor. Once assembled, the VersaPlanetary gearbox has 72 different gear ratios.
The VersaPlanetary gearbox is interchangeable with regular planetary gearboxes. However, it does require additional parts. You can purchase a gearbox without the motor but you’ll need a pinion. The pinion attaches to the shaft of the motor. The gearbox is very sturdy and durable, so you won’t have to worry about it breaking or wearing out.
Self-centering planetary gears
A planetary motor is a simple mechanical device that rotates around a axis, with the planets moving around the shaft in a radial direction. The planets are positioned so that they mesh with both the sun gear and the output gears. The carrier 48 is flexibly connected to the drive shaft and can move depending on the forces exerted by the planet gears. In this way, the planets can always be in the optimal mesh with the output gears and sun gear.
The first step in developing a planetary gear motor is to identify the number of teeth in each planet. The number of teeth should be an integer. The tooth diameters of the planets should mesh with each other and the ring. Typically, the teeth of one planet must mesh with each other, but the spacing between them must be equal or greater than the other. This can be achieved by considering the tooth count of each planet, as well as the spacing between planets.
A second step is to align the planet gears with the output gears. In a planetary motor, self-centering planetary gears must be aligned with both input and output gears to provide maximum torque. For this to be possible, the planet gears must be connected with the output shaft and the input shaft. Similarly, the output shaft should also be able to align with the input gear.
Encoders
A planetary geared motor is a DC motor with a planetary gearbox. The motor can be used to drive heavy loads and has a ratio of 104:1. The shaft speed is 116rpm when it is unloaded. A planetary gearbox has a low backlash and is often used in applications that need high torque. Planetary Motor encoders can help you keep track of your robot’s position or speed.
They are also able to control motor position and speed with precision. Most of them feature high resolution. A 0.18-degree resolution encoder will give you a minimum of 2000 transitions per rotation between outputs A and B. The encoder is built to industrial standards and has a sturdy gearbox to avoid damage. The encoder’s robust design means it will not stall when the motor reaches its maximum speed.
There are many advantages to a planetary motor encoder. A high-quality one will not lose its position or speed even if it’s subject to shocks. A good quality planetary motor will also last a long time. Planetary motors are great for resale or for your own project. If you’re considering buying a planetary motor, consider this information. It’ll help you decide if a particular model is right for your needs.
Cost
There are several advantages of planetary motors. One of the biggest is their cost, but they can also be used in many different applications. They can be combined with a variety of gearboxes, and are ideal for various types of robots, laboratory automation, and production applications. Planetary gearboxes are available in many different materials, and plastic planetary gearboxes are an economical alternative. Plastic gearboxes reduce noise at higher speeds, and steel input stage gears are available for high torques. A modified lubrication system can help with difficult operating conditions.
In addition to being more durable, planetary motors are much more efficient. They use fewer gears, which lowers the overall cost of production. Depending on the application, a planetary motor can be used to move a heavy object, but is generally less expensive than its counterpart. It is a better choice for situations where the load is relatively low and the motor is not used frequently. If you need a very high torque output, a planetary motor may be the better option.
Planetary gear units are a good choice for applications requiring high precision, high dynamics, and high torque density. They can be designed and built using TwinCAT and TC Motion Designer, and are delivered as complete motor and gear unit assemblies. In a few simple steps, you can calculate the torque required and compare the costs of different planetary gear units. You can then choose the best model for your application. And because planetary gear units are so efficient, they are a great option for high-end industrial applications.
Applications
There are several different applications of the planetary motor. One such application is in motion control. Planetary gearboxes have many benefits, including high torque, low backlash, and torsional stiffness. They also have an extremely compact design, and can be used for a variety of applications, from rack and pinion drives to delta robotics. In many cases, they are less expensive to manufacture and use than other types of motors.
Another application for planetary gear units is in rotary tables. These machines require high precision and low backlash for their precise positioning. Planetary gears are also necessary for noise reduction, which is a common feature in rotary tables. High precision planetary gears can make the height adjustment of OP tables a breeze. And because they are extremely durable and require low noise, they are a great choice for this application. In this case, the planetary gear is matched with an AM8000 series servomotor, which gives a wide range of choices.
The planetary gear transmission is also widely used in helicopters, automobiles, and marine applications. It is more advanced than a countershaft drive, and is capable of higher torque to weight ratios. Other advantages include its compact design and reduced noise. A key concern in the development of this type of transmission is to minimize vibration. If the output of a planetary gear transmission system is loud, the vibration caused by this type of drive system may be too loud for comfort.
editor by CX 2023-05-25
China 86mm Width BLDC Motor with Planetary / Worm Gearbox / Brake / Encoder / Controller Brushless DC Gear Geared Motor Used for Sliding Door with Customized Service car motor
Merchandise Description
86mm Width BLDC Motor with Planetary / Worm Gearbox / Brake / Encoder / Controller Brushless Dc Gear Geared Motor Utilized for Sliding Door with Custom-made Support
Item Description
Solution Title: Brushless DC Motor
Amount of Stage: 3 Phase
Amount of Poles: 4 Poles /8 Poles /ten Poles
Rated Voltage: 12v /24v /36v /48v /310v
Rated Speed: 3000rpm /4000rpm /or personalized
Rated Torque: Personalized
Rated Present: Custom-made
Rated Electricity: 23w~2500W
Jkongmotor has a broad range of micro motor manufacturing traces in the sector, including Stepper Motor, DC Servo Motor, AC Motor, Brushless Motor, Planetary Equipment Motor, Planetary Gearbox and many others. Through technological innovation and customization, we assist you generate outstanding application methods and provide adaptable remedies for a variety of industrial automation situations.
86mm 48V Dc Brushless Motor Parameters:
| Specification | Unit | Model | ||||
| JK86BLS58 | JK86BLS71 | JK86BLS84 | JK86BLS98 | JK86BLS125 | ||
| Number Of Period | Stage | 3 | ||||
| Variety Of Poles | Poles | 8 | ||||
| Rated Voltage | VDC | 48 | ||||
| Rated Velocity | Rpm | 3000 | ||||
| Rated Torque | N.m | .35 | .7 | one.05 | 1.four | 2.one |
| Rated Existing | Amps | three | six.three | nine | 11.five | 18 |
| Rated Energy | W | one hundred ten | 220 | 330 | 440 | 660 |
| Peak Torque | N.m | 1.05 | 2.1 | three.15 | four.2 | 6.3 |
| Peak Present | Amps | nine | 19 | 27 | 35 | 54 |
| Back E.M.F | V/Krpm | thirteen.7 | thirteen | 13.5 | 13.7 | thirteen.five |
| Torque Constant | N.m/A | .13 | .12 | .thirteen | .13 | .13 |
| Rotor Inertia | g.cm2 | four hundred | 800 | 1200 | 1600 | 2400 |
| Human body Size | mm | 71 | 84.five | ninety eight | 111.five | 138.5 |
| Excess weight | Kg | one.5 | 1.9 | two.3 | 2.7 | 4 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Diploma of Defense | IP30 | |||||
| Storage Temperature | -twenty five~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Functioning Humidity | 85% RH or under (no condensation) | |||||
| Operating Atmosphere | Outdoor (no direct sunlight), no corrosive gasoline, no flammable fuel, no oil mist, no dust | |||||
| Altitude | 1000 meters or considerably less | |||||
86mm Gearbox Parameters:
| Gearbox Electrical Specification: | ||||||
| Phase | One phase | Two phase | Three stage | |||
| Ratio | 3,4,5,8,ten | 12,fifteen,16,twenty,twenty five,32,forty,sixty four,a hundred | 64,80,100,120,125,a hundred and sixty,200,256,320,512,one thousand | |||
| Length (mm) | L2 | L3 | L2 | L3 | L2 | L3 |
| 153 | sixty five | 177 | 89 | 201 | 113 | |
| Max.Input Rpm (Rpm) | 6000 | 6000 | 6000 | |||
| Max.Radial load (N) | 550 | 550 | 550 | |||
| Max.Shaft axial load (N) | 500 | 500 | 500 | |||
| Effectiveness (%) | 96 | 94 | 90 | |||
| Backlash arcmin (arcmin) | ≤8 | ≤10 | ≤12 | |||
| Noise (dB) | ≤60 | ≤60 | ≤60 | |||
| Excess weight (Kg) | 3.2 | 3.nine | 4.8 | |||
| Typical usefui life (h) | >10000 | |||||
| Lubricating method | Long-phrase | |||||
| Rotation route | Input/Output syntropy | |||||
| Defense degree | IP65 | |||||
86mm Planetary Gearbox Parameters:
| Suitable brushless dc motor shaft | |||
| Motor Shaft Pinion Specs | |||
| Module | 1 | ||
| No. of tooth | twelve | 13 | 22 |
| Stress angle | 20° | ||
| Hole diameter | 10 tooth pinion | Φ7H7 | Φ8H7 |
| Reduction ratio | 1/6.6 1/23 1/26 1/37 1/92 1/138 | one/5.31 1/19 1/30 1/74 1/111 | one/3.55 1/13 1/fifty |
| Gearbox Specs: | ||||||
| Reduction ratio | Exact reduction ratio | Rated tolerance torque | Max momentary tolerance torque | Performance | L (mm) | Excess weight (g) |
| one/3.55 1/5.31 1/6.six | 1/3.55 1/5.31 1/6.6 | eight N.m Max | 12 N.m | .9 | 55.7±0.5 | 1100 |
| one/13 1/19 1/23 | 1/twelve.57 1/eighteen.82 1/23.four | thirty N.m Max | 45 N.m | 81% | seventy two.2±0.5 | 1500 |
| 1/26 1/30 1/37 | 1/26.05 1/30.08 1/37.4 | 60 N.m Max | 90 N.m | .73 | 72.2±0.five | 1500 |
| one/50 1/74 1/92 1/111 1/138 | 1/49.62 1/74.28 1/92.37 1/111.2 1/138.28 | 80 N.m Max | 120 N.m | 66% | 88.5±0.5 | 1880 |
| Input & output same rotation direction Motor Max. enter velocity: <4000rpm Operating temperature range: -15ºC ~ +80ºC | ||||||
Other Brushless Dc Motor
42mm 24V Brushless DC Motor Parameters:
| Specification | Unit | Model | |||
| JK42BLS01 | JK42BLS02 | JK42BLS03 | JK42BLS04 | ||
| Variety Of Period | Stage | 3 | |||
| Quantity Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 24 | |||
| Rated Speed | Rpm | 4000 | |||
| Rated Torque | N.m | .0625 | .125 | .185 | .25 |
| Peak Existing | Amps | 1.8 | 3.3 | 4.8 | six.three |
| Rated Electricity | W | 26 | 52.5 | seventy seven.5 | a hundred and five |
| Peak Torque | N.m | .19 | .38 | .56 | .seventy five |
| Peak Recent | Amps | 5.4 | 10.six | fifteen.five | 20 |
| Back E.M.F | V/Krpm | four.1 | four.2 | 4.three | 4.three |
| Torque Continual | N.m/A | .039 | .04 | .041 | .041 |
| Rotor Inertia | g.cm2 | 24 | 48 | seventy two | ninety six |
| Physique Duration | mm | ||||
| Excess weight | Kg | ||||
| Sensor | Honeywell | ||||
| Insulation Course | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -twenty five~+70ºC | ||||
| Working Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or under (no condensation) | ||||
| Operating Environment | Outdoor (no immediate sunlight), no corrosive gas, no flammable fuel, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
57mm 36V Brushless DC Motor Parameters:
| Specification | Unit | Model | ||||
| JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 | ||
| Variety Of Section | Section | 3 | ||||
| Number Of Poles | Poles | 4 | ||||
| Rated Voltage | VDC | 36 | ||||
| Rated Pace | Rpm | 4000 | ||||
| Rated Torque | N.m | .055 | .eleven | .22 | .33 | .forty four |
| Rated Existing | Amps | 1.two | two | 3.6 | five.3 | six.eight |
| Rated Energy | W | 23 | forty six | 92 | 138 | 184 |
| Peak Torque | N.m | .16 | .33 | .66 | one | one.32 |
| Peak Present | Amps | three.five | six.eight | 11.5 | 15.5 | twenty.5 |
| Back E.M.F | V/Krpm | 7.eight | seven.7 | seven.four | 7.3 | seven.one |
| Torque Consistent | N.m/A | .074 | .073 | .07 | .07 | .068 |
| Rotor Inertia | g.cm2 | 30 | seventy five | 119 | 173 | 230 |
| Entire body Size | mm | 37 | forty seven | 67 | 87 | 107 |
| Weight | Kg | .33 | .44 | .75 | one | one.25 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Diploma of Security | IP30 | |||||
| Storage Temperature | -twenty five~+70ºC | |||||
| Running Temperature | -fifteen~+50ºC | |||||
| Working Humidity | 85% RH or underneath (no condensation) | |||||
| Working Setting | Outdoor (no direct sunlight), no corrosive gasoline, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or considerably less | |||||
60mm 48V Brushless DC Motor Parameters:
| Specification | Unit | Model | |||
| JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 | ||
| Number Of Period | Stage | 3 | |||
| Variety Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Pace | Rpm | 3000 | |||
| Rated Torque | N.m | .three | .six | .nine | one.two |
| Rated Existing | Amps | 2.eight | 5.two | 7.5 | 9.five |
| Rated Energy | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | .nine | 1.eight | two.seven | three.6 |
| Peak Current | Amps | 8.four | fifteen.six | 22.five | 28.5 |
| Back again E.M.F | V/Krpm | twelve.1 | twelve.6 | twelve.4 | 13.3 |
| Torque Constant | N.m/A | .116 | .twelve | .118 | .127 |
| Rotor Inertia | kg.cm2 | .24 | .forty eight | .72 | .96 |
| Entire body Length | mm | seventy eight | ninety nine | 120 | 141 |
| Excess weight | Kg | .eighty five | 1.twenty five | one.sixty five | two.05 |
| Sensor | Honeywell | ||||
| Insulation Course | B | ||||
| Diploma of Defense | IP30 | ||||
| Storage Temperature | -twenty five~+70ºC | ||||
| Running Temperature | -15~+50ºC | ||||
| Operating Humidity | 85% RH or under (no condensation) | ||||
| Operating Atmosphere | Outdoor (no direct sunlight), no corrosive gas, no flammable fuel, no oil mist, no dust | ||||
| Altitude | 1000 meters or much less | ||||
80mm 48V BLDC Motor Parameters:
| Specification | Unit | Model | |||
| JK80BLS01 | JK80BLS02 | JK80BLS03 | JK80BLS04 | ||
| Number Of Section | Stage | 3 | |||
| Variety Of Poles | Poles | 4 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | .35 | .7 | one.05 | 1.four |
| Rated Current | Amps | 3 | five.5 | eight | 10.five |
| Rated Energy | W | 110 | 220 | 330 | 440 |
| Peak Torque | N.m | 1.05 | two.one | three.fifteen | 4.two |
| Peak Current | Amps | nine | sixteen.five | 24 | 31.5 |
| Again E.M.F | V/Krpm | 13.five | 13.three | 13.1 | thirteen |
| Torque Continuous | N.m/A | .thirteen | .127 | .126 | .124 |
| Rotor Inertia | g.cm2 | 210 | 420 | 630 | 840 |
| Body Duration | mm | seventy eight | ninety eight | 118 | 138 |
| Bodyweight | Kg | 1.4 | two | 2.6 | 3.two |
| Sensor | Honeywell | ||||
| Insulation Course | B | ||||
| Degree of Defense | IP30 | ||||
| Storage Temperature | -twenty five~+70ºC | ||||
| Running Temperature | -fifteen~+50ºC | ||||
| Functioning Humidity | 85% RH or beneath (no condensation) | ||||
| Operating Setting | Outdoor (no immediate sunlight), no corrosive gasoline, no flammable fuel, no oil mist, no dust | ||||
| Altitude | 1000 meters or much less | ||||
110mm 310V Brushless Motor Parameters:
| Specification | Unit | Model | |||
| JK110BLS050 | JK110BLS75 | JK110BLS100 | JK110BLS125 | ||
| Variety Of Section | Period | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 310 | |||
| Rated Velocity | Rpm | 3400 | |||
| Rated Torque | N.m | two.38 | three.3 | five | 6.6 |
| Rated Present | Amps | .five | .6 | .8 | 1 |
| Rated Electricity | KW | .75 | one.03 | 1.57 | two.07 |
| Back again E.M.F | V/Krpm | ninety one.1 | 91.one | 91.one | 88.6 |
| Torque Continual | N.m/A | .87 | .87 | .87 | .845 |
| Entire body Length | mm | 130 | a hundred and fifty five | a hundred and eighty | 205 |
| Sensor | Honeywell | ||||
| Insulation Course | H | ||||
Stepping Motor Customized
Planetary Gearbox Kind:
Thorough Pictures
Cnc Motor Kits Brushless dc Motor with Brake
Brushless Dc Motor with Planetary Gearbox Bldc Motor with Encoder
Brushless Dc Motor Brushed Dc Motor Hybrid Stepper Motor
Organization Profile
HangZhou CZPT Co., Ltd was a substantial technologies sector zone in HangZhou, china. Our products utilised in many types of machines, these kinds of as 3d printer CNC machine, health care gear, weaving printing equipments and so on.
JKONGMOTOR warmly welcome ‘OEM’ & ‘ODM’ cooperations and other firms to establish prolonged-term cooperation with us.
Company spirit of sincere and excellent track record, received the recognition and support of the broad masses of clients, at the same time with the domestic and overseas suppliers close group of interests, the organization entered the stage of stage of benign development, laying a sound basis for the strategic purpose of recognizing only really the sustainable growth of the company.
Equipments Display:
Manufacturing Circulation:
Package deal:
Certification:
|
US $10-50 / Piece | |
10 Pieces (Min. Order) |
###
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated |
|---|
###
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
###
| Samples: |
US$ 20/Piece
1 Piece(Min.Order) need to confirm the cost with seller
|
|---|
###
| Customization: |
Available
|
|---|
###
| Specification | Unit | Model | ||||
| JK86BLS58 | JK86BLS71 | JK86BLS84 | JK86BLS98 | JK86BLS125 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 8 | ||||
| Rated Voltage | VDC | 48 | ||||
| Rated Speed | Rpm | 3000 | ||||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 | 2.1 |
| Rated Current | Amps | 3 | 6.3 | 9 | 11.5 | 18 |
| Rated Power | W | 110 | 220 | 330 | 440 | 660 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 | 6.3 |
| Peak Current | Amps | 9 | 19 | 27 | 35 | 54 |
| Back E.M.F | V/Krpm | 13.7 | 13 | 13.5 | 13.7 | 13.5 |
| Torque Constant | N.m/A | 0.13 | 0.12 | 0.13 | 0.13 | 0.13 |
| Rotor Inertia | g.cm2 | 400 | 800 | 1200 | 1600 | 2400 |
| Body Length | mm | 71 | 84.5 | 98 | 111.5 | 138.5 |
| Weight | Kg | 1.5 | 1.9 | 2.3 | 2.7 | 4 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| Gearbox Electrical Specification: | ||||||
| Stage | One stage | Two stage | Three stage | |||
| Ratio | 3,4,5,8,10 | 12,15,16,20,25,32,40,64,100 | 64,80,100,120,125,160,200,256,320,512,1000 | |||
| Length (mm) | L2 | L3 | L2 | L3 | L2 | L3 |
| 153 | 65 | 177 | 89 | 201 | 113 | |
| Max.Input Rpm (Rpm) | 6000 | 6000 | 6000 | |||
| Max.Radial load (N) | 550 | 550 | 550 | |||
| Max.Shaft axial load (N) | 500 | 500 | 500 | |||
| Efficiency (%) | 96 | 94 | 90 | |||
| Backlash arcmin (arcmin) | ≤8 | ≤10 | ≤12 | |||
| Noise (dB) | ≤60 | ≤60 | ≤60 | |||
| Weight (Kg) | 3.2 | 3.9 | 4.8 | |||
| Average usefui life (h) | >10000 | |||||
| Lubricating system | Long-term | |||||
| Rotation direction | Input/Output syntropy | |||||
| Protection level | IP65 | |||||
###
| Suitable brushless dc motor shaft | |||
| Motor Shaft Pinion Specifications | |||
| Module | 1 | ||
| No. of teeth | 12 | 13 | 22 |
| Pressure angle | 20° | ||
| Hole diameter | 10 teeth pinion | Φ7H7 | Φ8H7 |
| Reduction ratio | 1/6.6 1/23 1/26 1/37 1/92 1/138 | 1/5.31 1/19 1/30 1/74 1/111 | 1/3.55 1/13 1/50 |
###
| Gearbox Specifications: | ||||||
| Reduction ratio | Exact reduction ratio | Rated tolerance torque | Max momentary tolerance torque | Efficiency | L (mm) | Weight (g) |
| 1/3.55 1/5.31 1/6.6 | 1/3.55 1/5.31 1/6.6 | 8 N.m Max | 12 N.m | 0.9 | 55.7±0.5 | 1100 |
| 1/13 1/19 1/23 | 1/12.57 1/18.82 1/23.4 | 30 N.m Max | 45 N.m | 81% | 72.2±0.5 | 1500 |
| 1/26 1/30 1/37 | 1/26.05 1/30.08 1/37.4 | 60 N.m Max | 90 N.m | 0.73 | 72.2±0.5 | 1500 |
| 1/50 1/74 1/92 1/111 1/138 | 1/49.62 1/74.28 1/92.37 1/111.2 1/138.28 | 80 N.m Max | 120 N.m | 66% | 88.5±0.5 | 1880 |
| Input & output same rotation direction; Motor Max. input speed: <4000rpm; Operating temperature range: -15ºC ~ +80ºC | ||||||
###
| Specification | Unit | Model | |||
| JK42BLS01 | JK42BLS02 | JK42BLS03 | JK42BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 24 | |||
| Rated Speed | Rpm | 4000 | |||
| Rated Torque | N.m | 0.0625 | 0.125 | 0.185 | 0.25 |
| Peak Current | Amps | 1.8 | 3.3 | 4.8 | 6.3 |
| Rated Power | W | 26 | 52.5 | 77.5 | 105 |
| Peak Torque | N.m | 0.19 | 0.38 | 0.56 | 0.75 |
| Peak Current | Amps | 5.4 | 10.6 | 15.5 | 20 |
| Back E.M.F | V/Krpm | 4.1 | 4.2 | 4.3 | 4.3 |
| Torque Constant | N.m/A | 0.039 | 0.04 | 0.041 | 0.041 |
| Rotor Inertia | g.cm2 | 24 | 48 | 72 | 96 |
| Body Length | mm | ||||
| Weight | Kg | ||||
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | ||||
| JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 4 | ||||
| Rated Voltage | VDC | 36 | ||||
| Rated Speed | Rpm | 4000 | ||||
| Rated Torque | N.m | 0.055 | 0.11 | 0.22 | 0.33 | 0.44 |
| Rated Current | Amps | 1.2 | 2 | 3.6 | 5.3 | 6.8 |
| Rated Power | W | 23 | 46 | 92 | 138 | 184 |
| Peak Torque | N.m | 0.16 | 0.33 | 0.66 | 1 | 1.32 |
| Peak Current | Amps | 3.5 | 6.8 | 11.5 | 15.5 | 20.5 |
| Back E.M.F | V/Krpm | 7.8 | 7.7 | 7.4 | 7.3 | 7.1 |
| Torque Constant | N.m/A | 0.074 | 0.073 | 0.07 | 0.07 | 0.068 |
| Rotor Inertia | g.cm2 | 30 | 75 | 119 | 173 | 230 |
| Body Length | mm | 37 | 47 | 67 | 87 | 107 |
| Weight | Kg | 0.33 | 0.44 | 0.75 | 1 | 1.25 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| Specification | Unit | Model | |||
| JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.3 | 0.6 | 0.9 | 1.2 |
| Rated Current | Amps | 2.8 | 5.2 | 7.5 | 9.5 |
| Rated Power | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | 0.9 | 1.8 | 2.7 | 3.6 |
| Peak Current | Amps | 8.4 | 15.6 | 22.5 | 28.5 |
| Back E.M.F | V/Krpm | 12.1 | 12.6 | 12.4 | 13.3 |
| Torque Constant | N.m/A | 0.116 | 0.12 | 0.118 | 0.127 |
| Rotor Inertia | kg.cm2 | 0.24 | 0.48 | 0.72 | 0.96 |
| Body Length | mm | 78 | 99 | 120 | 141 |
| Weight | Kg | 0.85 | 1.25 | 1.65 | 2.05 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK80BLS01 | JK80BLS02 | JK80BLS03 | JK80BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 4 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 |
| Rated Current | Amps | 3 | 5.5 | 8 | 10.5 |
| Rated Power | W | 110 | 220 | 330 | 440 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 |
| Peak Current | Amps | 9 | 16.5 | 24 | 31.5 |
| Back E.M.F | V/Krpm | 13.5 | 13.3 | 13.1 | 13 |
| Torque Constant | N.m/A | 0.13 | 0.127 | 0.126 | 0.124 |
| Rotor Inertia | g.cm2 | 210 | 420 | 630 | 840 |
| Body Length | mm | 78 | 98 | 118 | 138 |
| Weight | Kg | 1.4 | 2 | 2.6 | 3.2 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK110BLS050 | JK110BLS75 | JK110BLS100 | JK110BLS125 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 310 | |||
| Rated Speed | Rpm | 3400 | |||
| Rated Torque | N.m | 2.38 | 3.3 | 5 | 6.6 |
| Rated Current | Amps | 0.5 | 0.6 | 0.8 | 1 |
| Rated Power | KW | 0.75 | 1.03 | 1.57 | 2.07 |
| Back E.M.F | V/Krpm | 91.1 | 91.1 | 91.1 | 88.6 |
| Torque Constant | N.m/A | 0.87 | 0.87 | 0.87 | 0.845 |
| Body Length | mm | 130 | 155 | 180 | 205 |
| Sensor | Honeywell | ||||
| Insulation Class | H | ||||
|
US $10-50 / Piece | |
10 Pieces (Min. Order) |
###
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated |
|---|
###
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
###
| Samples: |
US$ 20/Piece
1 Piece(Min.Order) need to confirm the cost with seller
|
|---|
###
| Customization: |
Available
|
|---|
###
| Specification | Unit | Model | ||||
| JK86BLS58 | JK86BLS71 | JK86BLS84 | JK86BLS98 | JK86BLS125 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 8 | ||||
| Rated Voltage | VDC | 48 | ||||
| Rated Speed | Rpm | 3000 | ||||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 | 2.1 |
| Rated Current | Amps | 3 | 6.3 | 9 | 11.5 | 18 |
| Rated Power | W | 110 | 220 | 330 | 440 | 660 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 | 6.3 |
| Peak Current | Amps | 9 | 19 | 27 | 35 | 54 |
| Back E.M.F | V/Krpm | 13.7 | 13 | 13.5 | 13.7 | 13.5 |
| Torque Constant | N.m/A | 0.13 | 0.12 | 0.13 | 0.13 | 0.13 |
| Rotor Inertia | g.cm2 | 400 | 800 | 1200 | 1600 | 2400 |
| Body Length | mm | 71 | 84.5 | 98 | 111.5 | 138.5 |
| Weight | Kg | 1.5 | 1.9 | 2.3 | 2.7 | 4 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| Gearbox Electrical Specification: | ||||||
| Stage | One stage | Two stage | Three stage | |||
| Ratio | 3,4,5,8,10 | 12,15,16,20,25,32,40,64,100 | 64,80,100,120,125,160,200,256,320,512,1000 | |||
| Length (mm) | L2 | L3 | L2 | L3 | L2 | L3 |
| 153 | 65 | 177 | 89 | 201 | 113 | |
| Max.Input Rpm (Rpm) | 6000 | 6000 | 6000 | |||
| Max.Radial load (N) | 550 | 550 | 550 | |||
| Max.Shaft axial load (N) | 500 | 500 | 500 | |||
| Efficiency (%) | 96 | 94 | 90 | |||
| Backlash arcmin (arcmin) | ≤8 | ≤10 | ≤12 | |||
| Noise (dB) | ≤60 | ≤60 | ≤60 | |||
| Weight (Kg) | 3.2 | 3.9 | 4.8 | |||
| Average usefui life (h) | >10000 | |||||
| Lubricating system | Long-term | |||||
| Rotation direction | Input/Output syntropy | |||||
| Protection level | IP65 | |||||
###
| Suitable brushless dc motor shaft | |||
| Motor Shaft Pinion Specifications | |||
| Module | 1 | ||
| No. of teeth | 12 | 13 | 22 |
| Pressure angle | 20° | ||
| Hole diameter | 10 teeth pinion | Φ7H7 | Φ8H7 |
| Reduction ratio | 1/6.6 1/23 1/26 1/37 1/92 1/138 | 1/5.31 1/19 1/30 1/74 1/111 | 1/3.55 1/13 1/50 |
###
| Gearbox Specifications: | ||||||
| Reduction ratio | Exact reduction ratio | Rated tolerance torque | Max momentary tolerance torque | Efficiency | L (mm) | Weight (g) |
| 1/3.55 1/5.31 1/6.6 | 1/3.55 1/5.31 1/6.6 | 8 N.m Max | 12 N.m | 0.9 | 55.7±0.5 | 1100 |
| 1/13 1/19 1/23 | 1/12.57 1/18.82 1/23.4 | 30 N.m Max | 45 N.m | 81% | 72.2±0.5 | 1500 |
| 1/26 1/30 1/37 | 1/26.05 1/30.08 1/37.4 | 60 N.m Max | 90 N.m | 0.73 | 72.2±0.5 | 1500 |
| 1/50 1/74 1/92 1/111 1/138 | 1/49.62 1/74.28 1/92.37 1/111.2 1/138.28 | 80 N.m Max | 120 N.m | 66% | 88.5±0.5 | 1880 |
| Input & output same rotation direction; Motor Max. input speed: <4000rpm; Operating temperature range: -15ºC ~ +80ºC | ||||||
###
| Specification | Unit | Model | |||
| JK42BLS01 | JK42BLS02 | JK42BLS03 | JK42BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 24 | |||
| Rated Speed | Rpm | 4000 | |||
| Rated Torque | N.m | 0.0625 | 0.125 | 0.185 | 0.25 |
| Peak Current | Amps | 1.8 | 3.3 | 4.8 | 6.3 |
| Rated Power | W | 26 | 52.5 | 77.5 | 105 |
| Peak Torque | N.m | 0.19 | 0.38 | 0.56 | 0.75 |
| Peak Current | Amps | 5.4 | 10.6 | 15.5 | 20 |
| Back E.M.F | V/Krpm | 4.1 | 4.2 | 4.3 | 4.3 |
| Torque Constant | N.m/A | 0.039 | 0.04 | 0.041 | 0.041 |
| Rotor Inertia | g.cm2 | 24 | 48 | 72 | 96 |
| Body Length | mm | ||||
| Weight | Kg | ||||
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | ||||
| JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 4 | ||||
| Rated Voltage | VDC | 36 | ||||
| Rated Speed | Rpm | 4000 | ||||
| Rated Torque | N.m | 0.055 | 0.11 | 0.22 | 0.33 | 0.44 |
| Rated Current | Amps | 1.2 | 2 | 3.6 | 5.3 | 6.8 |
| Rated Power | W | 23 | 46 | 92 | 138 | 184 |
| Peak Torque | N.m | 0.16 | 0.33 | 0.66 | 1 | 1.32 |
| Peak Current | Amps | 3.5 | 6.8 | 11.5 | 15.5 | 20.5 |
| Back E.M.F | V/Krpm | 7.8 | 7.7 | 7.4 | 7.3 | 7.1 |
| Torque Constant | N.m/A | 0.074 | 0.073 | 0.07 | 0.07 | 0.068 |
| Rotor Inertia | g.cm2 | 30 | 75 | 119 | 173 | 230 |
| Body Length | mm | 37 | 47 | 67 | 87 | 107 |
| Weight | Kg | 0.33 | 0.44 | 0.75 | 1 | 1.25 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| Specification | Unit | Model | |||
| JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.3 | 0.6 | 0.9 | 1.2 |
| Rated Current | Amps | 2.8 | 5.2 | 7.5 | 9.5 |
| Rated Power | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | 0.9 | 1.8 | 2.7 | 3.6 |
| Peak Current | Amps | 8.4 | 15.6 | 22.5 | 28.5 |
| Back E.M.F | V/Krpm | 12.1 | 12.6 | 12.4 | 13.3 |
| Torque Constant | N.m/A | 0.116 | 0.12 | 0.118 | 0.127 |
| Rotor Inertia | kg.cm2 | 0.24 | 0.48 | 0.72 | 0.96 |
| Body Length | mm | 78 | 99 | 120 | 141 |
| Weight | Kg | 0.85 | 1.25 | 1.65 | 2.05 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK80BLS01 | JK80BLS02 | JK80BLS03 | JK80BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 4 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 |
| Rated Current | Amps | 3 | 5.5 | 8 | 10.5 |
| Rated Power | W | 110 | 220 | 330 | 440 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 |
| Peak Current | Amps | 9 | 16.5 | 24 | 31.5 |
| Back E.M.F | V/Krpm | 13.5 | 13.3 | 13.1 | 13 |
| Torque Constant | N.m/A | 0.13 | 0.127 | 0.126 | 0.124 |
| Rotor Inertia | g.cm2 | 210 | 420 | 630 | 840 |
| Body Length | mm | 78 | 98 | 118 | 138 |
| Weight | Kg | 1.4 | 2 | 2.6 | 3.2 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK110BLS050 | JK110BLS75 | JK110BLS100 | JK110BLS125 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 310 | |||
| Rated Speed | Rpm | 3400 | |||
| Rated Torque | N.m | 2.38 | 3.3 | 5 | 6.6 |
| Rated Current | Amps | 0.5 | 0.6 | 0.8 | 1 |
| Rated Power | KW | 0.75 | 1.03 | 1.57 | 2.07 |
| Back E.M.F | V/Krpm | 91.1 | 91.1 | 91.1 | 88.6 |
| Torque Constant | N.m/A | 0.87 | 0.87 | 0.87 | 0.845 |
| Body Length | mm | 130 | 155 | 180 | 205 |
| Sensor | Honeywell | ||||
| Insulation Class | H | ||||
How to Select a Gear Motor
A gearmotor is an electrical machine that transfers energy from one place to another. There are many types of gearmotors. This article will discuss the types of gearmotors, including Angular geared motors, Planetary gearboxes, Hydraulic gear motors, and Croise motors. In addition to its uses, gearmotors have many different characteristics. In addition, each type has distinct advantages and disadvantages. Listed below are a few tips on selecting a gearmotor.
Angular geared motors
Angular geared motors are the optimum drive element for applications where torques, forces, and motions need to be transferred at an angle. Compared to other types of geared motors, these have few moving parts, a compact design, and a long life. Angular geared motors are also highly efficient in travel drive applications. In addition to their durability, they have a low maintenance requirement and are highly corrosion-resistant.
Helical worm geared motors are a low-cost solution for drives that employ angular geared motors. They combine a worm gear stage and helical input stage to offer higher efficiency than pure worm geared motors. This drive solution is highly reliable and noise-free. Angular geared motors are often used in applications where noise is an issue, and helical worm geared motors are particularly quiet.
The gear ratio of an angular geared motor depends on the ratio between its input and output shaft. A high-quality helical geared motor has a relatively low mechanical noise level, and can be installed in almost any space. The torque of a helical geared motor can be measured by using frequency measurement equipment. The energy efficiency of angular geared motors is one of the most important factors when choosing a motor. Its symmetrical arrangement also allows it to operate in low-speed environments.
When selecting the right angular geared motor, it is important to keep in mind that increased torque will lead to poor output performance. Once a gear motor reaches its stall torque, it will no longer function properly. This makes it important to consult a performance curve to choose the appropriate motor. Most DC motor manufacturers are more than happy to provide these to customers upon request. Angular geared motors are more expensive than conventional worm gear motors.
Planetary gearboxes
Planetary gearboxes are used in industrial machinery to generate higher torque and power density. There are three main types of planetary gearboxes: double stage, triple stage, and multistage. The central sun gear transfers torque to a group of planetary gears, while the outer ring and spindle provide drive to the motor. The design of planetary gearboxes delivers up to 97% of the power input.
The compact size of planetary gears results in excellent heat dissipation. In some applications, lubrication is necessary to improve durability. Nevertheless, if you are looking for high speed transmission, you should consider the additional features, such as low noise, corrosion resistance, and construction. Some constructors are better than others. Some are quick to respond, while others are unable to ship their products in a timely fashion.
The main benefit of a planetary gearbox is its compact design. Its lightweight design makes it easy to install, and the efficiency of planetary gearboxes is up to 0.98%. Another benefit of planetary gearboxes is their high torque capacity. These gearboxes are also able to work in applications with limited space. Most modern automatic transmissions in the automotive industry use planetary gears.
In addition to being low in cost, planetary gearboxes are a great choice for many applications. Neugart offers both compact and right angle versions. The right angle design offers a high power-to-weight ratio, making it ideal for applications where torque is needed to be transmitted in reverse mode. So if you’re looking for an efficient way to move heavy machinery around, planetary gearboxes can be a great choice.
Another advantage of planetary gearboxes is their ability to be easily and rapidly changed from one application to another. Since planetary gears are designed to be flexible, you don’t have to buy new ones if you need to change gear ratios. You can also use planetary gears in different industries and save on safety stock by sharing common parts. These gears are able to withstand high shock loads and demanding conditions.
Hydraulic gear motors
Hydraulic gear motors are driven by oil that is pumped into a gear box and causes the gears to rotate. This method of energy production is quiet and inexpensive. The main drawbacks of hydraulic gear motors are that they are noisy and inefficient at low speeds. The other two types of hydraulic motors are piston and vane-type hydraulic motors. The following are some common benefits of hydraulic gear motors.
A hydraulic gear motor is composed of two gears – a driven gear and an idler. The driven gear is attached to the output shaft via a key. High-pressure oil flows into the housing between the gear tips and the motor housing, and the oil then exits through an outlet port. Unlike a conventional gear motor, the gears mesh to prevent the oil from flowing backward. As a result, they are an excellent choice for agricultural and industrial applications.
The most common hydraulic gear motors feature a gerotor and a drive gear. These gears mesh with a larger gear to produce rotation. There are also three basic variations of gear motors: roller-gerotor, gerotor, and differential. The latter produces higher torque and less friction than the previous two. These differences make it difficult to choose which type is the best for your needs. A high-performance gear motor will last longer than an ordinary one.
Radial piston hydraulic motors operate in the opposite direction to the reciprocating shaft of an electric gearmotor. They have nine pistons arranged around a common center line. Fluid pressure causes the pistons to reciprocate, and when they are stationary, the pistons push the fluid out and move back in. Because of the high pressure created by the fluid, they can rotate at speeds up to 25,000RPM. In addition, hydraulic gear motors are highly efficient, allowing them to be used in a wide range of industrial and commercial applications.
Hydraulic gear motors complement hydraulic pumps and motors. They are also available in reversible models. To choose the right hydraulic motor for your project, take time to gather all the necessary information about the installation process. Some types require specialized expertise or complicated installation. Also, there are some differences between closed and open-loop hydraulic motors. Make sure to discuss the options with a professional before you make a decision.
Croise motors
There are many advantages to choosing a Croise gear motor. It is highly compact, with less weight and space than standard motors. Its right-angle shaft and worm gear provide smooth, quiet operation. A silent-type brake ensures no metallic sound during operation. It also offers excellent positioning accuracy and shock resistance. This is why this motor is ideal for high-frequency applications. Let’s take a closer look.
A properly matched gearmotor will provide maximum torque output in a specified period. Its maximum developing torque is typically the rated output torque. A one-twelfth-horsepower (1/8 horsepower) motor can meet torque requirements of six inch-pounds, without exceeding its breakdown rating. This lower-cost unit allows for production variations and allows the customer to use a less powerful motor. Croise gear motors are available in a variety of styles.
editor by czh 2023-01-09
China 36mm High Torque 5n. M 10n. M 24V Brushed Brushless BLDC Planetary Gearbox Gear Motor for Robot motor engine
Product Description
SHN Motors
1.Features
1) Step Angle Accuracy: ±5%
2) Resistance Accuracy: ±10%
3) Inductance Accuracy: ±20%
4) Temperature Rise: 80°C Max
5) Ambient Temperature: -20°C~+50°C
6) Insulation Resistance: 100MΩ Min., 500VDC
7) Dielectric Strength: 500VAC for 1 minute
8) Shaft Radial Play: 0.02Max (450g-load)
9) Shaft Axial Play: 0.08Max (450g-load)
2.Related Specifications
1) 42mm series
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
2) 70mmSeries
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
3) 80mmSeries
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
4) 86mmSeries
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
5) 60mmSeries
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
6) 57mm Series
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
7) 57 High Torque
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
3.Outlines/Drawings
4.About US
5.Main Products
6.Package and Shipping
1.FedEX / DHL / UPS / TNT for samples,Door to door service;
2.By sea for batch goods;
3.Customs specifying freight forwarders or negotiable shipping methods;
4.Delivery Time:20-25 Days for samples;30-35 Days for batch goods;
5.Payment Terms:T/T,L/C at sight,D/P etc.
7.FAQ
Q1. When can I get the quotation?
We usually quote within 24 hours after we get your inquiry.
If you are urgent to get the price, please send the message on and or call us directly.
Q2. How can I get a sample to check your quality?
After price confirmed, you can requiry for samples to check quality.
If you need the samples, we will charge for the sample cost.
But the sample cost can be refundable when your quantity of first order is above the MOQ
Q3. Can you do OEM for us?
Yes, the product packing can be designed as you want.
Q4. How about MOQ?
1 pcs for carton box.
Q5. What is your main market?
Eastern Europe, Southeast Asia, South America.
Please feel free to contact us if you have any question.
|
US $20-40 / Piece | |
100 Pieces (Min. Order) |
###
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
###
| Samples: |
US$ 100/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
###
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
###
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
###
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
###
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
###
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
###
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
|
US $20-40 / Piece | |
100 Pieces (Min. Order) |
###
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
###
| Samples: |
US$ 100/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
###
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
###
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
###
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
###
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
###
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
###
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
The Basics of a Gear Motor
The basic mechanism behind the gear motor is the principle of conservation of angular momentum. The smaller the gear, the more RPM it covers and the larger the gear, the more torque it produces. The ratio of angular velocity of two gears is called the gear ratio. Moreover, the same principle applies to multiple gears. This means that the direction of rotation of each adjacent gear is always the opposite of the one it is attached to.
Induction worm gear motor
If you’re looking for an electric motor that can deliver high torque, an Induction worm gear motor might be the right choice. This type of motor utilizes a worm gear attached to the motor to rotate a main gear. Because this type of motor is more efficient than other types of motors, it can be used in applications requiring massive reduction ratios, as it is able to provide more torque at a lower speed.
The worm gear motor is designed with a spiral shaft that is set into splines in another gear. The speed at which the worm gear rotates is dependent on the torque produced by the main gear. Induction worm gear motors are best suited for use in low-voltage applications such as electric cars, renewable energy systems, and industrial equipment. They come with a wide range of power-supply options, including twelve-volt, 24-volt, and 36-volt AC power supplies.
These types of motors can be used in many industrial settings, including elevators, airport equipment, food packaging facilities, and more. They also produce less noise than other types of motors, which makes them a popular choice for manufacturers with limited space. The efficiency of worm gearmotors makes them an excellent choice for applications where noise is an issue. Induction worm gear motors can be compact and extremely high-torque.
While the Induction worm gear motor is most widely used in industrial applications, there are other kinds of gearmotors available. Some types are more efficient than others, and some are more expensive than others. For your application, choosing the correct motor and gearbox combination is crucial to achieving the desired result. You’ll find that the Induction worm gear motor is an excellent choice for many applications. The benefits of an Induction worm gear motor can’t be overstated.
The DC gear motor is an excellent choice for high-end industrial applications. This type of gearmotor is smaller and lighter than a standard AC motor and can deliver up to 200 watts of torque. A gear ratio of three to two can be found in these motors, which makes them ideal for a wide range of applications. A high-quality DC gear motor is a great choice for many industrial applications, as they can be highly efficient and provide a high level of reliability.
Electric gear motors are a versatile and widely used type of electric motor. Nevertheless, there are some applications that don’t benefit from them, such as applications with high shaft speed and low torque. Applications such as fan motors, pump and scanning machines are examples of such high-speed and high-torque demands. The most important consideration when choosing a gearmotor is its efficiency. Choosing the right size will ensure the motor runs efficiently at peak efficiency and will last for years.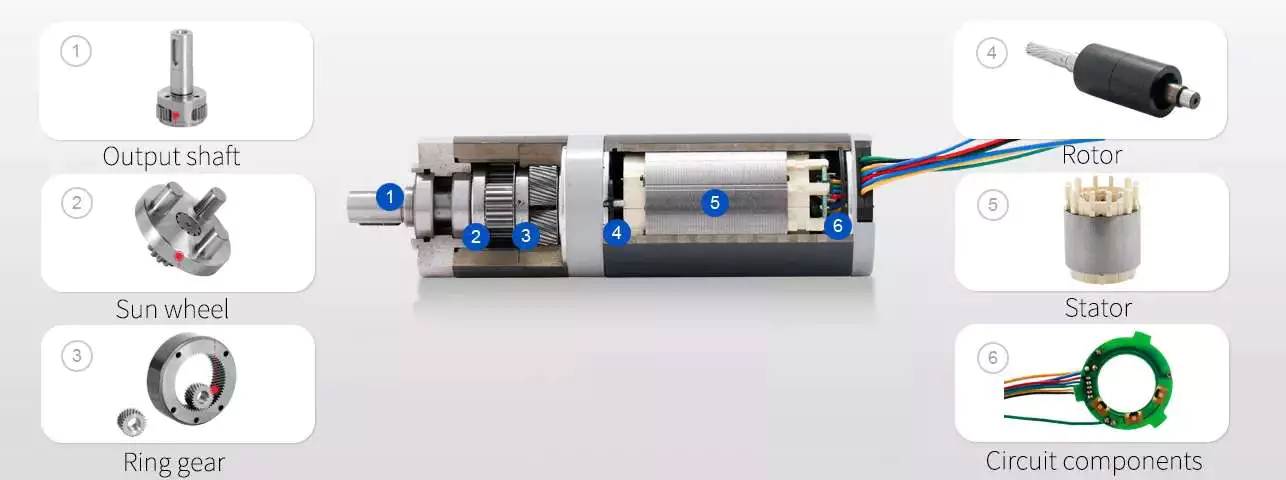
Parallel shaft helical gear motor
The FC series parallel shaft helical gearmotor is a compact, lightweight, and high-performance unit that utilizes a parallel shaft structure. Its compact design is complemented by high transmission efficiency and high carrying capacity. The motor’s material is 20CrMnTi alloy steel. The unit comes with either a flanged input or bolt-on feet for installation. Its low noise and compact design make it an ideal choice for a variety of applications.
The helical gears are usually arranged in two rows of one another. Each row contains one or more rows of teeth. The parallel row has the teeth in a helical pattern, while the helical rows are lined up parallelly. In addition to this, the cross helical gears have a point contact design and do not overlap. They can be either parallel or crossed. The helical gear motors can have any number of helical pairs, each with a different pitch circle diameter.
The benefits of the Parallel Shaft Helical Gearbox include high temperature and pressure handling. It is produced by skilled professionals using cutting-edge technology, and is widely recognized for its high performance. It is available in a range of technical specifications and is custom-made to suit individual requirements. These gearboxes are durable and low-noise and feature high reliability. You can expect to save up to 40% of your energy by using them.
The parallel shaft helical gear motors are designed to reduce the speed of a rotating part. The nodular cast iron housing helps make the unit robust in difficult environments, while the precision-machined gears provide quiet, vibration-free operation. These motors are available in double reduction, triple reduction, and quadruple reduction. The capacity ranges from 0.12 kW to 45 kW. You can choose from a wide variety of capacities, depending on the size of your gearing needs.
The SEW-EURODRIVE parallel shaft helical gearmotor is a convenient solution for space-constrained applications. The machine’s modular design allows for easy mounting and a wide range of ambient temperatures. They are ideal for a variety of mechanical applications, including conveyors, augers, and more. If you want a small footprint, the SEW-EURODRIVE parallel shaft helical gear motor is the best solution for you.
The parallel shaft helical gears are advantageous for both high and low speed applications. Parallel helical gears are also suitable for low speed and low duty applications. A good example of a cross-helix gear is the oil pump of an internal combustion engine. Both types of helical gears are highly reliable and offer vibration-free operation. They are more costly than conventional gear motors, but offer more durability and efficiency.
Helical gear unit
This helical gear unit is designed to operate under a variety of demanding conditions and can be used in a wide range of applications. Designed for long life and high torque density, this gear unit is available in a variety of torques and gear ratios. Its design and construction make it compatible with a wide range of critical mechanical systems. Common applications include conveyors, material handling, steel mills, and paper mills.
Designed for high-performance applications, the Heidrive helical gear unit provides superior performance and value. Its innovative design allows it to function well under a wide range of operating conditions and is highly resistant to damage. These gear motors can be easily combined with a helical gear unit. Their combined power output is 100 Nm, and they have a high efficiency of up to 90%. For more information about the helical gear motor, contact a Heidrive representative.
A helical gear unit can be classified by its reference section in the standard plane or the turning plane. Its center gap is the same as that of a spur gear, and its number of teeth is the same. In addition to this, the helical gear has a low axial thrust, which is another important characteristic. The helical gear unit is more efficient at transferring torque than a spur gear, and it is quieter, too.
These units are designed to handle large loads. Whether you are using them for conveyors, augers, or for any other application that involves high-speed motion, a helical gear unit will deliver maximum performance. A helical gear unit from Flender can handle 400,000 tasks with a high degree of reliability. Its high efficiency and high resistance to load ensures high plant availability. These gear motors are available in a variety of sizes, from single-speed to multi-speed.
PEC geared motors benefit from decades of design experience and high quality materials. They are robust, quiet, and offer excellent performance. They are available in multiple configurations and are dimensionally interchangeable with other major brands. The gear motors are manufactured as modular kits to minimize inventory. They can be fitted with additional components, such as backstops and fans. This makes it easy to customize your gear motors and save money while reducing costs.
Another type of helical gears is the double helical gear. The double helical gear unit has two helical faces with a gap between them. They are better for enclosed gear systems as they provide greater tooth overlap and smoother performance. Compared to double helical gears, they are smaller and more flexible than the Herringbone type. So, if you’re looking for a gear motor, a helical gear unit may be perfect for you.
editor by czh 2022-11-27