Product Description
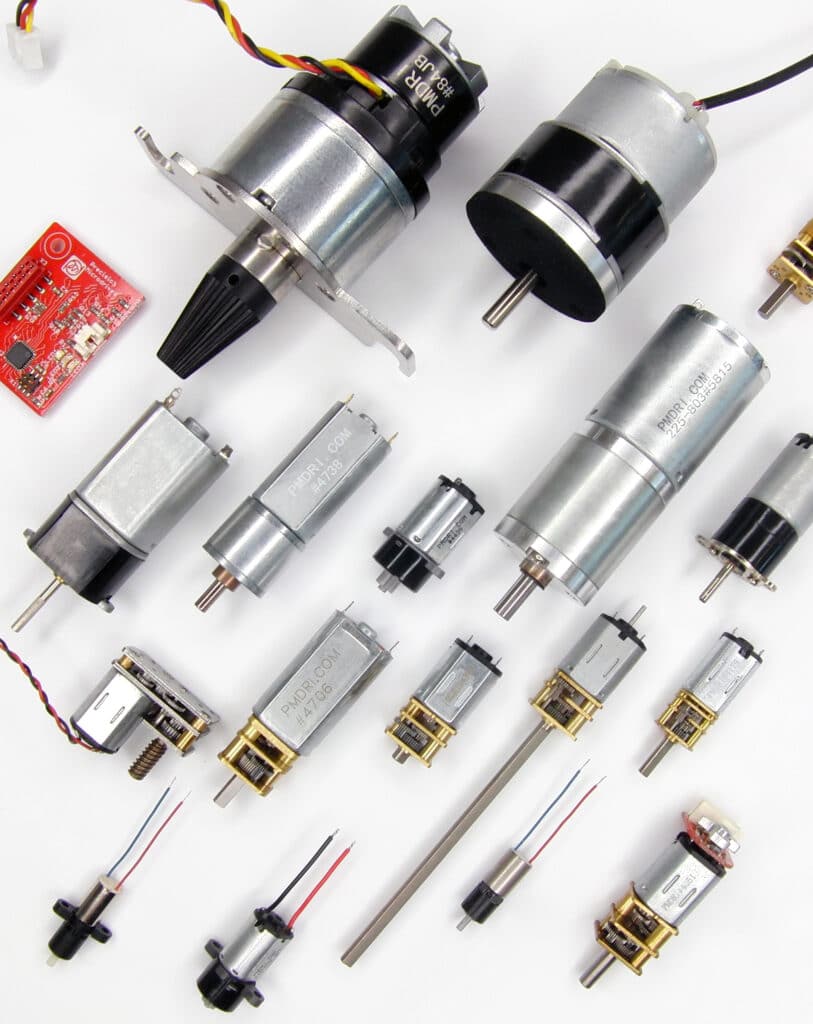
1ph 3ph 30W Reversible Induction Micro Gear AC Motors
AC Gear Motor Full Ranges:
| Motor type | Induction motor, brake motor, torque motor, speed adjustable motor, reversible motor |
| Frame size | 60 mm, 70mm, 80mm, 90mm, 104mm |
| Motor Output speed | 1250rpm – 1500rpm |
| Gearbox Speed Ratio | 1:3 – 1: 500 |
| Output power | 60mm: 6W, 10W
70mm: 15W, 20W 80mm: 25W, 30W 90mm: 40W, 60W, 90W, 120W 104mm: 140W, 200W, 250W, 370W … |
| Output shaft | 8mm ~ 50mm; round shaft, D-cut shaft, key-way shaft, hollow shaft |
| Voltage | 110v, 220v, 230v, 380v |
| Frequency | 50Hz, 60Hz |
| If you need standard or customized AC or DC motors, pls freely contact us. We shall reply wihtin 12 hours. | |
Company Overview
HISTORY: Greensky is a mechanical brand of CHINAMFG Power Co., Ltd. With over 10 years’
mechanical manufacturing experiences, CHINAMFG Power always strictly stands on the
principle of Best Customer Satisfaction.
QUALITY: Material Inspection, Production Control, Finished Goods Test, Pre-dellivery Inspection
MISSION: “Once and forever” is our goal to serve customers in the world. Once we do
business with customer, we will do business forever.
MARKET: 30 different countries, mainly Germany, Austria, Japan, USA and Middle-East.
DELIVERY: 100% on-time delivery Guaranteed.
SERVICES: Fast response in English, German, Japanese and Chinese languages.
OEM: Customized orders are welcome at CHINAMFG Power.
Certificates
Overseas Exhibitions
Welcome your inquiry!
Our Sales Team will reply you as soon as possible.
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal |
|---|---|
| Speed: | Variable Speed |
| Number of Stator: | 1pH/3pH |
| Function: | Driving, Control |
| Casing Protection: | Closed Type |
| Number of Poles: | 4 |
| Samples: |
US$ 50/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
|
|
|---|

Can gear motors be used in robotics, and if so, what are some notable applications?
Yes, gear motors are widely used in robotics due to their ability to provide torque, precise control, and compact size. They play a crucial role in various robotic applications, enabling the movement, manipulation, and control of robotic systems. Here are some notable applications of gear motors in robotics:
1. Robotic Arm Manipulation:
Gear motors are commonly used in robotic arms to provide precise and controlled movement. They enable the articulation of the arm’s joints, allowing the robot to reach different positions and orientations. Gear motors with high torque capabilities are essential for lifting, rotating, and manipulating objects with varying weights and sizes.
2. Mobile Robots:
Gear motors are employed in mobile robots, including wheeled robots and legged robots, to drive their locomotion. They provide the necessary torque and control for the robot to move, turn, and navigate in different environments. Gear motors with appropriate gear ratios ensure the robot’s mobility, stability, and maneuverability.
3. Robotic Grippers and End Effectors:
Gear motors are used in robotic grippers and end effectors to control the opening, closing, and gripping force. By integrating gear motors into the gripper mechanism, robots can grasp and manipulate objects of various shapes, sizes, and weights. The gear motors enable precise control over the gripping action, allowing the robot to handle delicate or fragile objects with care.
4. Autonomous Drones and UAVs:
Gear motors are utilized in the propulsion systems of autonomous drones and unmanned aerial vehicles (UAVs). They drive the propellers or rotors, providing the necessary thrust and control for the drone’s flight. Gear motors with high power-to-weight ratios, efficient energy conversion, and precise speed control are crucial for achieving stable and maneuverable flight in drones.
5. Humanoid Robots:
Gear motors are integral to the movement and functionality of humanoid robots. They are used in robotic joints, such as hips, knees, and shoulders, to enable human-like movements. Gear motors with appropriate torque and speed capabilities allow humanoid robots to walk, run, climb stairs, and perform complex motions resembling human actions.
6. Robotic Exoskeletons:
Gear motors play a vital role in robotic exoskeletons, which are wearable robotic devices designed to augment human strength and assist in physical tasks. Gear motors are used in the exoskeleton’s joints and actuators, providing the necessary torque and control to enhance human abilities. They enable users to perform tasks with reduced effort, assist in rehabilitation, or provide support in physically demanding environments.
These are just a few notable applications of gear motors in robotics. Their versatility, torque capabilities, precise control, and compact size make them indispensable components in various robotic systems. Gear motors enable robots to perform complex tasks, move with agility, interact with the environment, and assist humans in a wide range of applications, from industrial automation to healthcare and exploration.
What is the significance of gear reduction in gear motors, and how does it affect efficiency?
Gear reduction plays a significant role in gear motors as it enables the motor to deliver higher torque while reducing the output speed. This feature has several important implications for gear motors, including enhanced power transmission, improved control, and potential trade-offs in terms of efficiency. Here’s a detailed explanation of the significance of gear reduction in gear motors and its effect on efficiency:
Significance of Gear Reduction:
1. Increased Torque: Gear reduction allows gear motors to generate higher torque output compared to a motor without gears. By reducing the rotational speed at the output shaft, gear reduction increases the mechanical advantage of the system. This increased torque is beneficial in applications that require high torque to overcome resistance, such as lifting heavy loads or driving machinery with high inertia.
2. Improved Control: Gear reduction enhances the control and precision of gear motors. By reducing the speed, gear reduction allows for finer control over the motor’s rotational movement. This is particularly important in applications that require precise positioning or accurate speed control. The gear reduction mechanism enables gear motors to achieve smoother and more controlled movements, reducing the risk of overshooting or undershooting the desired position.
3. Load Matching: Gear reduction helps match the motor’s power characteristics to the load requirements. Different applications have varying torque and speed requirements. Gear reduction allows the gear motor to achieve a better match between the motor’s power output and the specific requirements of the load. It enables the motor to operate closer to its peak efficiency by optimizing the torque-speed trade-off.
Effect on Efficiency:
While gear reduction offers several advantages, it can also affect the efficiency of gear motors. Here’s how gear reduction impacts efficiency:
1. Mechanical Efficiency: The gear reduction process introduces mechanical components such as gears, bearings, and lubrication systems. These components introduce additional friction and mechanical losses into the system. As a result, some energy is lost in the form of heat during the gear reduction process. The efficiency of the gear motor is influenced by the quality of the gears, the lubrication used, and the overall design of the gear system. Well-designed and properly maintained gear systems can minimize these losses and optimize mechanical efficiency.
2. System Efficiency: Gear reduction affects the overall system efficiency by impacting the motor’s electrical efficiency. In gear motors, the motor typically operates at higher speeds and lower torques compared to a direct-drive motor. The overall system efficiency takes into account both the electrical efficiency of the motor and the mechanical efficiency of the gear system. While gear reduction can increase the torque output, it also introduces additional losses due to increased mechanical complexity. Therefore, the overall system efficiency may be lower compared to a direct-drive motor for certain applications.
It’s important to note that the efficiency of gear motors is influenced by various factors beyond gear reduction, such as motor design, control systems, and operating conditions. The selection of high-quality gears, proper lubrication, and regular maintenance can help minimize losses and improve efficiency. Additionally, advancements in gear technology, such as the use of precision gears and improved lubricants, can contribute to higher overall efficiency in gear motors.
In summary, gear reduction is significant in gear motors as it provides increased torque, improved control, and better load matching. However, gear reduction can introduce mechanical losses and affect the overall efficiency of the system. Proper design, maintenance, and consideration of application requirements are essential to optimize the balance between torque, speed, and efficiency in gear motors.

What are the different types of gears used in gear motors, and how do they impact performance?
Various types of gears are used in gear motors, each with its unique characteristics and impact on performance. The choice of gear type depends on the specific requirements of the application, including torque, speed, efficiency, noise level, and space constraints. Here’s a detailed explanation of the different types of gears used in gear motors and their impact on performance:
1. Spur Gears:
Spur gears are the most common type of gears used in gear motors. They have straight teeth that are parallel to the gear’s axis and mesh with another spur gear to transmit power. Spur gears provide high efficiency, reliable operation, and cost-effectiveness. However, they can generate significant noise due to the meshing of teeth, and they may produce axial thrust forces. Spur gears are suitable for applications that require high torque transmission and moderate to high rotational speeds.
2. Helical Gears:
Helical gears have angled teeth that are cut at an angle to the gear’s axis. This helical tooth configuration enables gradual engagement and smoother tooth contact, resulting in reduced noise and vibration compared to spur gears. Helical gears provide higher load-carrying capacity and are suitable for applications that require high torque transmission and moderate to high rotational speeds. They are commonly used in gear motors where low noise operation is desired, such as in automotive applications and industrial machinery.
3. Bevel Gears:
Bevel gears have teeth that are cut on a conical surface. They are used to transmit power between intersecting shafts, usually at right angles. Bevel gears can have straight teeth (straight bevel gears) or curved teeth (spiral bevel gears). These gears provide efficient power transmission and precise motion control in applications where shafts need to change direction. Bevel gears are commonly used in gear motors for applications such as steering systems, machine tools, and printing presses.
4. Worm Gears:
Worm gears consist of a worm (a type of screw) and a mating gear called a worm wheel or worm gear. The worm has a helical thread that meshes with the worm wheel, resulting in a compact and high gear reduction ratio. Worm gears provide high torque transmission, low noise operation, and self-locking properties, which prevent reverse motion. They are commonly used in gear motors for applications that require high gear reduction and locking capabilities, such as in lifting mechanisms, conveyor systems, and machine tools.
5. Planetary Gears:
Planetary gears, also known as epicyclic gears, consist of a central sun gear, multiple planet gears, and an outer ring gear. The planet gears mesh with both the sun gear and the ring gear, creating a compact and efficient gear system. Planetary gears offer high torque transmission, high gear reduction ratios, and excellent load distribution. They are commonly used in gear motors for applications that require high torque and compact size, such as in robotics, automotive transmissions, and industrial machinery.
6. Rack and Pinion:
Rack and pinion gears consist of a linear rack (a straight toothed bar) and a pinion gear (a spur gear with a small diameter). The pinion gear meshes with the rack to convert rotary motion into linear motion or vice versa. Rack and pinion gears provide precise linear motion control and are commonly used in gear motors for applications such as linear actuators, CNC machines, and steering systems.
The choice of gear type in a gear motor depends on factors such as the desired torque, speed, efficiency, noise level, and space constraints. Each type of gear offers specific advantages and impacts the performance of the gear motor differently. By selecting the appropriate gear type, gear motors can be optimized for their intended applications, ensuring efficient and reliable power transmission.


editor by CX 2024-04-09
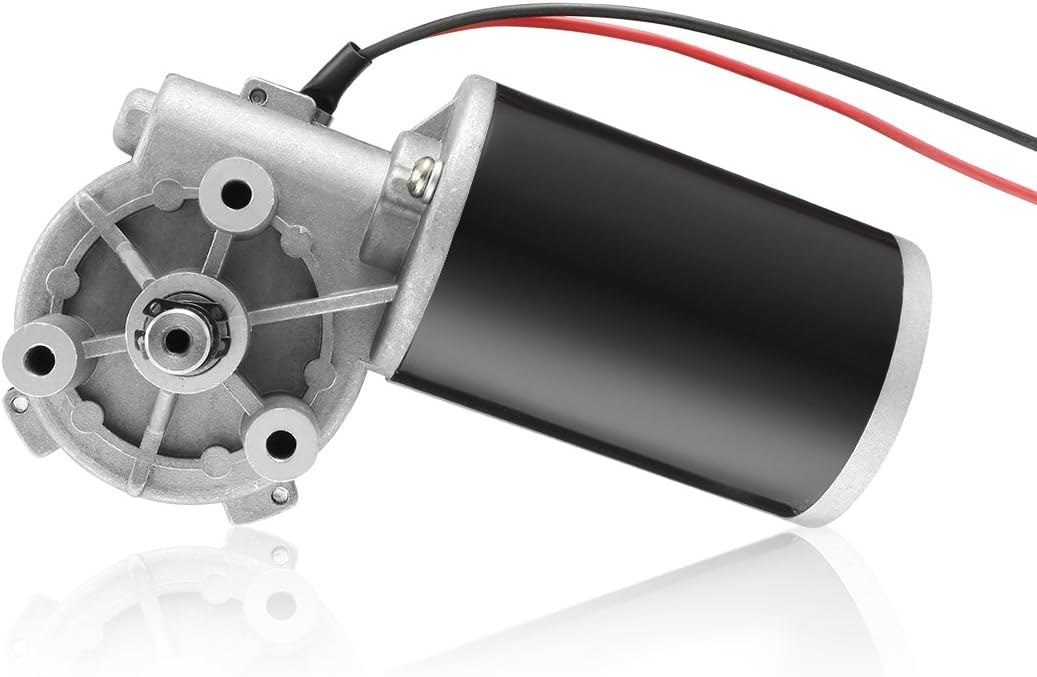
China Custom Single Phase Three Phase 110V/220V/380V 60W 90W 120W 140W 180W 200W 250W Micro Electric Induction Reversible AC Gear Motor vacuum pump engine
Product Description
TaiBang Motor Industry Group Co., Ltd.
The main products is induction motor, reversible motor, DC brush gear motor, DC brushless gear motor, CH/CV big gear motors, Planetary gear motor ,Worm gear motor etc, which used widely in various fields of manufacturing pipelining, transportation, food, medicine, printing, fabric, packing, office, apparatus, entertainment etc, and is the preferred and matched product for automatic machine.
Motor Model Instruction
5RK40GN-CM
| 5 | R | K | 40 | R | GN | C | M |
| Frame Size | Type | Motor series | Power | Speed Control Motor |
Shaft Type | Voltage | Accessory |
| 2:60mm
3:70mm 4:80mm 5:90mm 6:104mm |
I:Induction
R:Reversible T:Torque |
K series | 6W
15W 25W 40W 60W 90W 120W 140W 180W 200W |
A:Round Shaft
GN:Bevel Gear Shaft GU:Bevel Gear Shaft |
A:Single Phase 110V
C:Single Phase 220V S:3-Phase 220V S3:3-Phase 380V S4:3-Phase 440V |
T/P:Thermally Protected
F:Fan M:Electro-magnetic |
Gear Head Model Instruction
5GN-100K
| 5 | GN | 100 | K | |
| Frame Size | Shaft Type | Gear Reduction Ratio | Bearing Type | Other information |
| 2:60mm
3:70mm 4:80mm 5:90mm 6:104mm |
GN:Bevel Gear Shaft (60#,70#,80#,90# reduction gear head) GU:Bevel Gear Shaft GM:Intermediate Gear Head GS:Gearhead with ears |
1:100 | K:Standard Rolling Bearing
RT:Right Angle With Axile RC:Right Angle With Hollow Shaft |
Sch as shaft diameter,shaft length,etc. |
Specification of motor 40W 90mm Fixed speed AC gear motor
| Type | Gear Tooth Output Shaft | Power (W) |
Frequency (Hz) |
Voltage (V) |
Current (A) |
Start Torque (g.cm) |
Rated | Gearbox Type | ||
| Torque (g.cm) |
Speed (rpm) |
Bearing Gearbox | Middle Gearbox | |||||||
| Reversible Motor | 5RK40GN-C | 40 | 50 | 220 | 0.45 | 3000 | 3000 | 1300 | 5GN/GU-K | 5GN10X |
| 40 | 60 | 220 | 0.41 | 2500 | 2515 | 1550 | 5GN/GU-K | 5GN10X | ||
Gear Head Torque Table(Kg.cm) (kg.cm×9.8÷100)=N.m
| Output Speed :RPM | 500 | 300 | 200 | 150 | 120 | 100 | 75 | 60 | 50 | 30 | 20 | 15 | 10 | 7.5 | 6 | 5 | 3 | ||
| Speed Ratio | 50Hz | 3 | 5 | 7.5 | 10 | 12.5 | 15 | 20 | 25 | 30 | 50 | 75 | 100 | 150 | 200 | 250 | 300 | 500 | |
| 60Hz | 3.6 | 6 | 9 | 15 | 18 | 30 | 36 | 60 | 90 | 120 | 180 | 300 | 360 | 600 | |||||
| Allowed Torque |
40W | kg.cm | 6.7 | 11 | 16 | 21.3 | 28 | 33 | 42 | 54 | 65 | 108 | 150 | 150 | 150 | 150 | 150 | 150 | 150 |
| 60W | kg.cm | 10 | 16 | 24 | 32 | 40 | 48 | 64 | 77 | 93 | 150 | 150 | 150 | 150 | 150 | 150 | 150 | 150 | |
| 90W | kg.cm | 14 | 23 | 35 | 46 | 58 | 69 | 92 | 110 | 133 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | |
| 120W | kg.cm | 19 | 30.7 | 46 | 61 | 77 | 92 | 123 | 147 | 177 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | |
| Note: Speed figures are based on synchronous speed, The actual output speed, under rated torque conditions, is about 10-20% less than synchronous speed, a grey background indicates output shaft of geared motor rotates in the same direction as output shaft of motor. A white background indicates rotates rotation in the opposite direction. | |||||||||||||||||||
Drawing:5RK40GN-C/5GN3~20K(Short gearbox shell 43mm)
Drawing:5RK40GN-C/5GN25~180K(Short gearbox shell 61mm)
Above drawing is for standard screw hole.If need through hole, terminal box, or electronic magnet brake, need to tell the seller.
Connection Diagram:
| Application: | Industrial |
|---|---|
| Speed: | Constant Speed |
| Number of Stator: | Single-Phase |
| Function: | Driving, Control |
| Casing Protection: | Closed Type |
| Number of Poles: | 4 |
| Samples: |
US$ 50/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
|
|
|---|
How is the efficiency of a gear motor measured, and what factors can affect it?
The efficiency of a gear motor is a measure of how effectively it converts electrical input power into mechanical output power. It indicates the motor’s ability to minimize losses and maximize its energy conversion efficiency. The efficiency of a gear motor is typically measured using specific methods, and several factors can influence it. Here’s a detailed explanation:
Measuring Efficiency:
The efficiency of a gear motor is commonly measured by comparing the mechanical output power (Pout) to the electrical input power (Pin). The formula to calculate efficiency is:
Efficiency = (Pout / Pin) * 100%
The mechanical output power can be determined by measuring the torque (T) produced by the motor and the rotational speed (ω) at which it operates. The formula for mechanical power is:
Pout = T * ω
The electrical input power can be measured by monitoring the current (I) and voltage (V) supplied to the motor. The formula for electrical power is:
Pin = V * I
By substituting these values into the efficiency formula, the efficiency of the gear motor can be calculated as a percentage.
Factors Affecting Efficiency:
Several factors can influence the efficiency of a gear motor. Here are some notable factors:
- Friction and Mechanical Losses: Friction between moving parts, such as gears and bearings, can result in mechanical losses and reduce the overall efficiency of the gear motor. Minimizing friction through proper lubrication, high-quality components, and efficient design can help improve efficiency.
- Gearing Efficiency: The design and quality of the gears used in the gear motor can impact its efficiency. Gear trains can introduce mechanical losses due to gear meshing, misalignment, or backlash. Using well-designed gears with proper tooth profiles and minimizing gear train losses can improve efficiency.
- Motor Type and Construction: Different types of motors (e.g., brushed DC, brushless DC, AC induction) have varying efficiency characteristics. Motor construction, such as the quality of magnetic materials, winding resistance, and rotor design, can also affect efficiency. Choosing motors with higher efficiency ratings can improve overall gear motor efficiency.
- Electrical Losses: Electrical losses, such as resistive losses in motor windings or in the motor drive circuitry, can reduce efficiency. Minimizing resistance, optimizing motor drive electronics, and using efficient control algorithms can help mitigate electrical losses.
- Load Conditions: The operating conditions and load characteristics placed on the gear motor can impact its efficiency. Heavy loads, high speeds, or frequent acceleration and deceleration can increase losses and reduce efficiency. Matching the gear motor’s specifications to the application requirements and optimizing load conditions can improve efficiency.
- Temperature: Elevated temperatures can significantly affect the efficiency of a gear motor. Excessive heat can increase resistive losses, reduce lubrication effectiveness, and affect the magnetic properties of motor components. Proper cooling and thermal management techniques are essential to maintain optimal efficiency.
By considering these factors and implementing measures to minimize losses and optimize performance, the efficiency of a gear motor can be enhanced. Manufacturers often provide efficiency specifications for gear motors, allowing users to select motors that best meet their efficiency requirements for specific applications.

How does the voltage and power rating of a gear motor impact its suitability for different tasks?
The voltage and power rating of a gear motor are important factors that influence its suitability for different tasks. These specifications determine the motor’s electrical characteristics and its ability to perform specific tasks effectively. Here’s a detailed explanation of how voltage and power rating impact the suitability of a gear motor for different tasks:
1. Voltage Rating:
The voltage rating of a gear motor refers to the electrical voltage it requires to operate optimally. Here’s how the voltage rating affects suitability:
- Compatibility with Power Supply: The gear motor’s voltage rating must match the available power supply. Using a motor with a voltage rating that is too high or too low for the power supply can lead to improper operation or damage to the motor.
- Electrical Safety: Adhering to the specified voltage rating ensures electrical safety. Using a motor with a higher voltage rating than recommended can pose safety hazards, while using a motor with a lower voltage rating may result in inadequate performance.
- Application Flexibility: Different tasks or applications may have specific voltage requirements. For example, low-voltage gear motors are commonly used in battery-powered devices or applications with low-power requirements, while high-voltage gear motors are suitable for industrial applications or tasks that require higher power output.
2. Power Rating:
The power rating of a gear motor indicates its ability to deliver mechanical power. It is typically specified in units of watts (W) or horsepower (HP). The power rating impacts the suitability of a gear motor in the following ways:
- Load Capacity: The power rating determines the maximum load that a gear motor can handle. Motors with higher power ratings are capable of driving heavier loads or handling tasks that require more torque.
- Speed and Torque: The power rating affects the motor’s speed and torque characteristics. Motors with higher power ratings generally offer higher speeds and greater torque output, making them suitable for applications that require faster operation or the ability to overcome higher resistance or loads.
- Efficiency and Energy Consumption: The power rating is related to the motor’s efficiency and energy consumption. Higher power-rated motors may be more efficient, resulting in lower energy losses and reduced operating costs over time.
- Thermal Considerations: Motors with higher power ratings may generate more heat during operation. It is crucial to consider the motor’s power rating in relation to its thermal management capabilities to prevent overheating and ensure long-term reliability.
Considerations for Task Suitability:
When selecting a gear motor for a specific task, it is important to consider the following factors in relation to the voltage and power rating:
- Required Torque and Load: Assess the torque and load requirements of the task to ensure that the gear motor’s power rating is sufficient to handle the expected load without being overloaded.
- Speed and Precision: Consider the desired speed and precision of the task. Motors with higher power ratings generally offer better speed control and accuracy.
- Power Supply Availability: Evaluate the availability and compatibility of the power supply with the gear motor’s voltage rating. Ensure that the power supply can provide the required voltage for the motor’s optimal operation.
- Environmental Factors: Consider any specific environmental factors, such as temperature or humidity, that may impact the gear motor’s performance. Ensure that the motor’s voltage and power ratings are suitable for the intended operating conditions.
In summary, the voltage and power rating of a gear motor have significant implications for its suitability in different tasks. The voltage rating determines compatibility with the power supply and ensures electrical safety, while the power rating influences load capacity, speed, torque, efficiency, and thermal considerations. When choosing a gear motor, it is crucial to carefully evaluate the task requirements and consider the voltage and power rating in relation to factors such as torque, speed, power supply availability, and environmental conditions.
What are the different types of gears used in gear motors, and how do they impact performance?
Various types of gears are used in gear motors, each with its unique characteristics and impact on performance. The choice of gear type depends on the specific requirements of the application, including torque, speed, efficiency, noise level, and space constraints. Here’s a detailed explanation of the different types of gears used in gear motors and their impact on performance:
1. Spur Gears:
Spur gears are the most common type of gears used in gear motors. They have straight teeth that are parallel to the gear’s axis and mesh with another spur gear to transmit power. Spur gears provide high efficiency, reliable operation, and cost-effectiveness. However, they can generate significant noise due to the meshing of teeth, and they may produce axial thrust forces. Spur gears are suitable for applications that require high torque transmission and moderate to high rotational speeds.
2. Helical Gears:
Helical gears have angled teeth that are cut at an angle to the gear’s axis. This helical tooth configuration enables gradual engagement and smoother tooth contact, resulting in reduced noise and vibration compared to spur gears. Helical gears provide higher load-carrying capacity and are suitable for applications that require high torque transmission and moderate to high rotational speeds. They are commonly used in gear motors where low noise operation is desired, such as in automotive applications and industrial machinery.
3. Bevel Gears:
Bevel gears have teeth that are cut on a conical surface. They are used to transmit power between intersecting shafts, usually at right angles. Bevel gears can have straight teeth (straight bevel gears) or curved teeth (spiral bevel gears). These gears provide efficient power transmission and precise motion control in applications where shafts need to change direction. Bevel gears are commonly used in gear motors for applications such as steering systems, machine tools, and printing presses.
4. Worm Gears:
Worm gears consist of a worm (a type of screw) and a mating gear called a worm wheel or worm gear. The worm has a helical thread that meshes with the worm wheel, resulting in a compact and high gear reduction ratio. Worm gears provide high torque transmission, low noise operation, and self-locking properties, which prevent reverse motion. They are commonly used in gear motors for applications that require high gear reduction and locking capabilities, such as in lifting mechanisms, conveyor systems, and machine tools.
5. Planetary Gears:
Planetary gears, also known as epicyclic gears, consist of a central sun gear, multiple planet gears, and an outer ring gear. The planet gears mesh with both the sun gear and the ring gear, creating a compact and efficient gear system. Planetary gears offer high torque transmission, high gear reduction ratios, and excellent load distribution. They are commonly used in gear motors for applications that require high torque and compact size, such as in robotics, automotive transmissions, and industrial machinery.
6. Rack and Pinion:
Rack and pinion gears consist of a linear rack (a straight toothed bar) and a pinion gear (a spur gear with a small diameter). The pinion gear meshes with the rack to convert rotary motion into linear motion or vice versa. Rack and pinion gears provide precise linear motion control and are commonly used in gear motors for applications such as linear actuators, CNC machines, and steering systems.
The choice of gear type in a gear motor depends on factors such as the desired torque, speed, efficiency, noise level, and space constraints. Each type of gear offers specific advantages and impacts the performance of the gear motor differently. By selecting the appropriate gear type, gear motors can be optimized for their intended applications, ensuring efficient and reliable power transmission.
editor by CX 2023-10-23
China supplier Silinman 6W-1.5kw Micro AC Gear Motor vacuum pump and compressor
Product Description
Technical Standard of Micro AC Gear Motor
Insulation resistance:under normal temperature normal humidity condition,at motor rated operation,use DC500V megger,measure the insulation resistance between the winding and casing, which should be above 100MΩ
Insulation voltage:under normal temperature normal humidity condition,at motor rated operation,apply a voltage 1.5KV(50hz/60hz) between winding and casing for 1 minute without any abnormalities.
Temperature rise:under normal load condition and rated operation, the temperature rise of the winding measured by the resistance method should be within 75K
Insulation level:F(130°C)
Overheat protection: can customize overheat protection device(automatic reset type),115°C automatic stop,85°C±15°C automatic reset
Ambient temperature:-10°C-40°C(No freezing)
Ambient humidity:below 85%(no condensation)
Micro AC Gear Motor=Micro AC Motor(Induction motor, reversible motor,torque motor)+Gearbox(Reducer)
Micro AC Motor type:
1)Induction motor, with working form,S1-continuous working;
2)Reversible motor, with working form S2-30min working;
3)Torque motor,
Motor Size:60mm,70mm,80mm,90mm,104mm,120mm
Motor Power:6w,10w,15w,25w,40w,60w,90w,120w,140w,180w,200w,250w,300w,370w,400w,750w,1.5kw
Motor Voltage:AC,1phase110v,1phase220v,1phase230v,3phase220v,3phase380v,3phase220v/380v,and other customized voltages
Motor Poles and Speed:4P,1400rpm/50Hz;1680rpm/60Hz(2P is available)
Motor accessories:electromagnetic brake,terminal box,thermally protection,fan
Output shaft:round shaft,gear shaft
Rotation direction:CW,CCW
Micro AC Motor with round shaft
Micro AC Motor with gear shaft
AC motor description:
| Micro AC Motor | ||||||||||||||
| Code | Size | Power | Single phase | Three phase 3 wires | Three phase 6 wires | Terminal junction box | ||||||||
| Constant speed | Speed regulation | Thermally | Brake | Damping | Thermally | Brake | Damping | Thermally | ||||||
| Brake | Damping | Brake | Damping | |||||||||||
| 2 | 60mm | 6w | × | × | × | × | × | × | × | × | × | × | × | √ |
| 3 | 70mm | 15w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | √ |
| 4 | 80mm | 25w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | √ |
| 40w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | √ | ||
| 5 | 90mm | 40w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | √ |
| 60w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | |||
| 90w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | |||
| 120w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | |||
| 140w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | |||
| 180w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | |||
| 6 | 104mm | 180w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | √ |
| 200w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | |||
| 250w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | |||
| 300w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | |||
| 370w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | |||
| 7 | 120mm | 400w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | √ |
| 550w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | √ | ||
| 750w | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | × | |||
Gearbox description:
Gearbox type:GK,GS,90mm five-stage
Gearbox size:60mm,70mm,80mm,90mm,104mm,120mm
Gearbox ratio:2K-750K
Decimal middle gearbox:10X
| Gear Reducer | ||||||
| Code | Size | 10X middle gearbox | Normal type GK Gearbox | |||
| Output shaft/key width | Ratio | |||||
| 2 stage transmission | 3 stage transmission | 4 stage transmission | ||||
| 2 | 60mm | can customize round shaft Φ8/Φ10 | Φ8 milling 7, Φ10 key 4 | 2k,2.5k,3k,3.6k,4k,5k,6k,7.5k,9k,10k,12.5k,15k, 18k | 20k,25k,30k, 36k,40k | 50k,60k,75k,80k,90k,100k,120k,150k,180k,200k,250k,300k |
| 3 | 70mm | can customize round shaft Φ10/Φ12 | Φ10 key 4 | 2k,2.5k,3k,5k,6k,7.5k,9k,10k, 12.5k,15k,18k | 20k,25k,30k, 36k,40k,50k | 60k,75k,90k, 100k,120k,150k,180k,200k,250k |
| 4 | 80mm | can customize round shaft Φ10/Φ12 | Φ10 key 4 | 2k,2.5k,3k,5k,6k,7.5k,9k,10k, 12.5k,15k,18k | 20k,25k,30k, 36k,50k | 60k,75k,90k, 100k,120k,150k,180k,250k,300k |
| 5 | 90mm | can customize round shaft Φ10/Φ12/ Φ15 | Φ12 key 4 Φ15 key 5 | 2k,2.5k,3k,3.6k,5k,6k,7.5k,9k, 9.5k,10k, 12.5k | 15k,18k,20k, 25k | 30k,36k,50k,60k,75k,90k,100k, 120k,150k,180k,250k,300k,400k,500k,600k,750k |
| 6 | 104mm | can customize round shaft Φ12/ Φ15/Φ18 | Φ15 key 5 Φ18 key 6 | 2k,2.5k,3k,3.6k,5k,6k,7.5k,9k, 9.5k,10k, 12.5k | 15k,18k,20k, 25k,30k,36k, 50k | 60k,75k,90k, 100k,120k,150k, 180k,250k,300k, 400k,500k,600k, 750k |
| 7 | 120mm | can customize round shaft Φ22/ Φ25 | Φ22 key 6 | 2k,2.5k,3k,3.6k,5k,6k,7.5k,10k, 12.5k | 15k,18k,20k, 25k,30k | 40k,50k,60k,75k,90k,100k,120k,150k,180k,200k,250k |
Gearbox description:
Gearbox type: Right Angle Gearbox(Hollow center, CHINAMFG output shaft ceneter, Hollow eccentric,Solid output shaft eccentric)
Gearbox size: 80mm,90mm,104mm,120mm
Gearbox ratio:2K-2250K
| Right Angle Gear Reducer | ||||||
| Code | Size | Output shaft diameter | Gear Ratio | |||
| Hollow Center | Solid Center | |||||
| Standard | non-standard | Standard | non-standard | |||
| 4 | 80mm | Φ15 | × | Φ12 | × | 6k,7.5k,9k,15k,18k,23k,27k,30k, 37.5k,45k,54k,60k,75k,90k,108k, 150k,180k,225k,270k,300k, 360k,450k,540k,750k,900k |
| 5 | 90mm | Φ17 | Φ15,Φ20 | Φ15 | × | right angle center(spiral bevel gear) right angle eccentric(worm gear) 2.5k,3k,3.6k,5k,6.25k,7.5k,9k, 12.5k,15k,18k,23k,25k,31k, 37.5k,45k,50k,62.5k,75k,90k, 125k,150k,188k,225k,250k, 300k,375k,450k,625k,750k, 1000k,1250k,1500k,1875k |
| 6 | 104mm | Φ22 | Φ17,Φ20, Φ24,Φ25 | Φ22 | Φ20 | 6k,7.5k,9k,15k,18k,23k,18k,30k,37.5k,45k,54k,60k,75k,90k,108k,150k, 180k,225k,270k,300k, 360k,450k,540k,750k,900k, 1200k, 1500k,1800k,2250k |
| 7 | 120mm | Φ30 | Φ22,Φ20, Φ28 | Φ30 | Φ22 | 6k,7.5k,9k,11k,15k,18k,23k,30k,37.5k,45k,54k,60k,75k,90k,120k,150k, 180k,225k,270k,300k, 360k,450k,540k,600k,750k |
Gearbox description:
Gearbox type: Linear type gearbox,horizontal/vertical
Gearbox size: 60mm,70mm,80mm,90mm,104mm,120mm
| Motor | Linear type Reducer | ||||
| Code | Size | Linear moving speed mm/s, vertical/horizontal | |||
| round shape linear | round shap linear diameter and maximum length | square shape linear | square shape linear size and maximum length | ||
| 2 | 60mm | 4/4.8/6/6.7/8/10/12/13.4/15/16/20/24/30/33.4/40/48/60/66.8/80/96/120/ 133.6/160/200/240/300/ 334/400/480/600 | Φ14mm,500mm | 4/4.8/6/6.7/8/10/12/13.4/15/16/20/24/30/33.4/40/48/60/66.8/80/96/120/ 133.6/160/200/240/300/334/400/480/600 | £14mm,1000mm |
| 3 | 70mm | 4.8/6/6.7/8/10/12/13.4/ 16/20/24/30/33.4/40/48/60/66.8/80/96/120/133.6/160/200/240/400/480/ 600 | Φ14mm,1200mm | 4.8/6/6.7/8/10/12/13.4/ 16/20/24/30/33.4/40/48/60/66.8/80/96/120/133.6/160/200/240/400/480/ 600 | £14mm,1000mm |
| 4 | 80mm | 5/6/8.3/10/12.5/15/16.7/20/25/30/42/50/60/75/ 83.4/100/120/150/167/ 200/250/300/500/600/ 750 | Φ20mm,1200mm | 5/6/8.3/10/12.5/15/16.7/20/25/30/42/50/60/75/ 83.4/100/120/150/167/ 200/250/300/500/600/ 750 | £20mm,1000 |
| 5 | 90mm | 2.2/2.8/3.4/4.2/5.6/6.8/ 9.5/11.3/14/17/19/23/28/34/47/56.5/68/85/94/113/136/170/188/226/282/ 339/471/566/679/849 | Φ25,3000mm | 2/2.5/3/3.8/5/6/8.3/10/ 12.5/15/16.7/20/25/30/ 42/50/60/75/83.4/100/ 120/150/167/200/250/ 300/417/200/250/300/ 417/500/600/750 | £20,1000mm |
| 6 | 104mm | 2.5/3/3.6/4.6/6/7.4/10.2/12.3/15/20.4/24.5/30.6/ 37/51/61/73.5/92/102/ 122.5/147/184/204/245/ 306/368/613/735/919 | Φ25,3000mm | 2/2.5/3/3.8/5/6/8.3/10/ 12.5/15/16.7/20/25/30/ 42/50/60/75/83.4/100/ 120/150/167/200/250/ 300/417/200/250/300/ 500/600/750 | £20,800mm |
| 7 | 120mm | 10.2/14/17/21.2/25.5/ 28.3/34/42.4/51/85/102/127/141/170/204/255/ 339/424/509/707/848/ 1018/1273/ | Φ25,3000mm | 10.2/14/17/21.2/25.5/ 28.3/34/42.4/51/85/102/127/141/170/204/255/ 339/424/509/707/848/ 1018/1273/ | £20,800mm |
| Application: | Automation Equipment |
|---|---|
| Operating Speed: | Adjust Speed, Constant Speed |
| Power Source: | AC Motor |
| Function: | Driving |
| Casing Protection: | Closed Type |
| Number of Poles: | 4poles and 2poles |
| Customization: |
Available
|
|
|---|
Are there innovations or emerging technologies in the field of gear motor design?
Yes, there are several innovations and emerging technologies in the field of gear motor design. These advancements aim to improve the performance, efficiency, compactness, and reliability of gear motors. Here are some notable innovations and emerging technologies in gear motor design:
1. Miniaturization and Compact Design:
Advancements in manufacturing techniques and materials have enabled the miniaturization of gear motors without compromising their performance. Gear motors with compact designs are highly sought after in applications where space is limited, such as robotics, medical devices, and consumer electronics. Innovative approaches like micro-gear motors and integrated motor-gear units are being developed to achieve smaller form factors while maintaining high torque and efficiency.
2. High-Efficiency Gearing:
New gear designs focus on improving efficiency by reducing friction and mechanical losses. Advanced gear manufacturing techniques, such as precision machining and 3D printing, allow for the creation of intricate gear tooth profiles that optimize power transmission and minimize losses. Additionally, the use of high-performance materials, coatings, and lubricants helps reduce friction and wear, improving overall gear motor efficiency.
3. Magnetic Gearing:
Magnetic gearing is an emerging technology that replaces traditional mechanical gears with magnetic fields to transmit torque. It utilizes the interaction of permanent magnets to transfer power, eliminating the need for physical gear meshing. Magnetic gearing offers advantages such as high efficiency, low noise, compactness, and maintenance-free operation. While still being developed and refined, magnetic gearing holds promise for various applications, including gear motors.
4. Integrated Electronics and Controls:
Gear motor designs are incorporating integrated electronics and controls to enhance performance and functionality. Integrated motor drives and controllers simplify system integration, reduce wiring complexity, and allow for advanced control features. These integrated solutions offer precise speed and torque control, intelligent feedback mechanisms, and connectivity options for seamless integration into automation systems and IoT (Internet of Things) platforms.
5. Smart and Condition Monitoring Capabilities:
New gear motor designs incorporate smart features and condition monitoring capabilities to enable predictive maintenance and optimize performance. Integrated sensors and monitoring systems can detect abnormal operating conditions, track performance parameters, and provide real-time feedback for proactive maintenance and troubleshooting. This helps prevent unexpected failures, extend the lifespan of gear motors, and improve overall system reliability.
6. Energy-Efficient Motor Technologies:
Gear motor design is influenced by advancements in energy-efficient motor technologies. Brushless DC (BLDC) motors and synchronous reluctance motors (SynRM) are gaining popularity due to their higher efficiency, better power density, and improved controllability compared to traditional brushed DC and induction motors. These motor technologies, when combined with optimized gear designs, contribute to overall system energy savings and performance improvements.
These are just a few examples of the innovations and emerging technologies in gear motor design. The field is continuously evolving, driven by the need for more efficient, compact, and reliable motion control solutions in various industries. Gear motor manufacturers and researchers are actively exploring new materials, manufacturing techniques, control strategies, and system integration approaches to meet the evolving demands of modern applications.

What are some common challenges or issues associated with gear motors, and how can they be addressed?
Gear motors, like any mechanical system, can face certain challenges or issues that may affect their performance, reliability, or longevity. However, many of these challenges can be addressed through proper design, maintenance, and operational practices. Here are some common challenges associated with gear motors and potential solutions:
1. Gear Wear and Failure:
Over time, gears in a gear motor can experience wear, resulting in decreased performance or even failure. The following measures can address this challenge:
- Proper Lubrication: Regular lubrication with the appropriate lubricant can minimize friction and wear between gear teeth. It is essential to follow manufacturer recommendations for lubrication intervals and use high-quality lubricants suitable for the specific gear motor.
- Maintenance and Inspection: Routine maintenance and periodic inspections can help identify early signs of gear wear or damage. Timely replacement of worn gears or components can prevent further damage and ensure the gear motor’s optimal performance.
- Material Selection: Choosing gears made from durable and wear-resistant materials, such as hardened steel or specialized alloys, can increase their lifespan and resistance to wear.
2. Backlash and Inaccuracy:
Backlash, as discussed earlier, can introduce inaccuracies in gear motor systems. The following approaches can help address this issue:
- Anti-Backlash Gears: Using anti-backlash gears, which are designed to minimize or eliminate backlash, can significantly reduce inaccuracies caused by gear play.
- Tight Manufacturing Tolerances: Ensuring precise manufacturing tolerances during gear production helps minimize backlash and improve overall accuracy.
- Backlash Compensation: Implementing control algorithms or mechanisms to compensate for backlash can help mitigate its effects and improve the accuracy of the gear motor.
3. Noise and Vibrations:
Gear motors can generate noise and vibrations during operation, which may be undesirable in certain applications. The following strategies can help mitigate this challenge:
- Noise Dampening: Incorporating noise-dampening features, such as vibration-absorbing materials or isolation mounts, can reduce noise and vibrations transmitted from the gear motor to the surrounding environment.
- Quality Gears and Bearings: Using high-quality gears and bearings can minimize vibrations and noise generation. Precision-machined gears and well-maintained bearings help ensure smooth operation and reduce unwanted noise.
- Proper Alignment: Ensuring accurate alignment of gears, shafts, and other components reduces the likelihood of noise and vibrations caused by misalignment. Regular inspections and adjustments can help maintain optimal alignment.
4. Overheating and Thermal Management:
Heat buildup can be a challenge in gear motors, especially during prolonged or heavy-duty operation. Effective thermal management techniques can address this issue:
- Adequate Ventilation: Providing proper ventilation and airflow around the gear motor helps dissipate heat. This can involve designing cooling fins, incorporating fans or blowers, or ensuring sufficient clearance for air circulation.
- Heat Dissipation Materials: Using heat-dissipating materials, such as aluminum or copper, in motor housings or heat sinks can improve heat dissipation and prevent overheating.
- Monitoring and Control: Implementing temperature sensors and thermal protection mechanisms allows for real-time monitoring of the gear motor’s temperature. If the temperature exceeds safe limits, the motor can be automatically shut down or adjusted to prevent damage.
5. Load Variations and Shock Loads:
Unexpected load variations or shock loads can impact the performance and durability of gear motors. The following measures can help address this challenge:
- Proper Sizing and Selection: Choosing gear motors with appropriate torque and load capacity ratings for the intended application helps ensure they can handle expected load variations and occasional shock loads without exceeding their limits.
- Shock Absorption: Incorporating shock-absorbing mechanisms, such as dampers or resilient couplings, can help mitigate the effects of sudden load changes or impacts on the gear motor.
- Load Monitoring: Implementing load monitoring systems or sensors allows for real-time monitoring of load variations. This information can be used to adjust operation or trigger protective measures when necessary.
By addressing these common challenges associated with gear motors through appropriate design considerations, regular maintenance, and operational practices, it is possible to enhance their performance, reliability, and longevity.
Can you explain the advantages of using gear motors in various mechanical systems?
Gear motors offer several advantages when utilized in various mechanical systems. Their unique characteristics make them well-suited for applications that require controlled power transmission, precise speed control, and torque amplification. Here’s a detailed explanation of the advantages of using gear motors:
1. Torque Amplification:
One of the key advantages of gear motors is their ability to amplify torque. By using different gear ratios, gear motors can increase or decrease the output torque from the motor. This torque amplification is crucial in applications that require high torque output, such as lifting heavy loads or operating machinery with high resistance. Gear motors allow for efficient power transmission, enabling the system to handle demanding tasks effectively.
2. Speed Control:
Gear motors provide precise speed control, allowing for accurate and controlled movement in mechanical systems. By selecting the appropriate gear ratio, the rotational speed of the output shaft can be adjusted to match the requirements of the application. This speed control capability ensures that the mechanical system operates at the desired speed, whether it needs to be fast or slow. Gear motors are commonly used in applications such as conveyors, robotics, and automated machinery, where precise speed control is essential.
3. Directional Control:
Another advantage of gear motors is their ability to control the rotational direction of the output shaft. By using different types of gears, such as spur gears, bevel gears, or worm gears, the direction of rotation can be easily changed. This directional control is beneficial in applications that require bidirectional movement, such as in actuators, robotic arms, and conveyors. Gear motors offer reliable and efficient directional control, contributing to the versatility and functionality of mechanical systems.
4. Efficiency and Power Transmission:
Gear motors are known for their high efficiency in power transmission. The gear system helps distribute the load across multiple gears, reducing the strain on individual components and minimizing power losses. This efficient power transmission ensures that the mechanical system operates with optimal energy utilization and minimizes wasted power. Gear motors are designed to provide reliable and consistent power transmission, resulting in improved overall system efficiency.
5. Compact and Space-Saving Design:
Gear motors are compact in size and offer a space-saving solution for mechanical systems. By integrating the motor and gear system into a single unit, gear motors eliminate the need for additional components and reduce the overall footprint of the system. This compact design is especially beneficial in applications with limited space constraints, allowing for more efficient use of available space while still delivering the necessary power and functionality.
6. Durability and Reliability:
Gear motors are designed to be robust and durable, capable of withstanding demanding operating conditions. The gear system helps distribute the load, reducing the stress on individual gears and increasing overall durability. Additionally, gear motors are often constructed with high-quality materials and undergo rigorous testing to ensure reliability and longevity. This makes gear motors well-suited for continuous operation in industrial and commercial applications, where reliability is crucial.
By leveraging the advantages of torque amplification, speed control, directional control, efficiency, compact design, durability, and reliability, gear motors provide a reliable and efficient solution for various mechanical systems. They are widely used in industries such as robotics, automation, manufacturing, automotive, and many others, where precise and controlled mechanical power transmission is essential.
editor by CX 2023-10-20