Product Description
| ZWSMD571571 22mm gearbox data | ||||||
| Gearbox number | 1 | 2 | 3 | 4 | 5 | |
| Continuous output torque (MAX) | 1 | 2.9 | 4.3 | 5.5 | 5.5 | Nm |
| Instant mobilization torque (MAX) | 1.25 | 3.6 | 5.3 | 6.5 | 6.5 | Nm |
| Reduction ratio | 3.71 | 9.7,14 |
43,66 |
94,112,134,159,190,246 |
415 ,592,989,1526 | / |
| Outer diameter | 22mm | mm | ||||
| Gearbox length | 24.3 | 32.8 | 40.4 | 46.5 | 52.6 | mm |
| Maximum efficiency | 96 | 92 | 90 | 87 | 83 | % |
| Recommended temperature range | -30~+100 | -30~+100 | -30~+100 | -30~+100 | -30~+100 | ºC |
| Gearbox weight | 53 | 65 | 76 | 88 | 102 | G |
| Maximum transmission power | 66 | 36 | 20 | 11 | 6 | W |
| Air load average empty return | 82.5 | 45 | 25 | 14 | 7 | W |
| Air load average empty return | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | ° |
| The maximum axial load | 80 | 80 | 80 | 80 | 80 | N |
| The maximum radial load | 100 | 145 | 150 | 150 | 150 | N |
| Output Bearing | Pearl bearing | |||||
| Axial gap | 0~0.1 | mm | ||||
| *Note: The above data does not include the motor, the overall sale of the deceased and the motor, the specific parameters can be customized according to the customer’s requirements. | ||||||
ZWSMD22571 22mm High-performance brushless gearbox motor
Product advantages:
1-Version that can provide machine processing
2-Use high-performance material
3- Provide an improved version that can work in the temperature change range and special environmental conditions
4-can be improved according to customer requirements
| ZWSMD571571 Motor Data | ||
| Product model | ZWSMD571571 | |
| Environmental temperature | -40 …+100 ºC | |
| Maximum transmission power | 30W | |
| Maximum continuous torque | 3.7nm | |
| Maximum continuous input speed | 4000RMPM | |
| Output terminal bearing | Rolling Pearl Bearing | |
| model | Rated voltage (V) | Air load data | Load data |
Total length (mm) |
Gearbox rated torque (NM) |
Gearbox instantaneous torque (NM) |
Reduction ratio |
gearbox length L1 (mm) |
|||
|
Air-load speed (rpm) |
No-load current (mA max) |
Load speed (rpm) |
Load current (A Max) |
Torque (gf.cm) |
|||||||
| ZWSMD571571-3.71 | 24 | 1914 | 150 | 1482 | 1 | 552 | 56.3 | 1 | 1.25 | 3.71 | 24.3 |
| ZWSMD571571-9.7 | 24 | 732 | 200 | 567 | 1.2 | 1383 | 64.8 | 2.9 | 3.6 | 9.7 | 32.8 |
| ZWSMD571571-14 | 24 | 507 | 200 | 393 | 1.2 | 1996 | 64.8 | 2.9 | 3.6 | 14 | 32.8 |
| ZWSMD571571-43 | 24 | 165 | 250 | 128 | 1.5 | 5999 | 72.4 | 4.3 | 5.3 | 43 | 40.4 |
| ZWSMD571571-66 | 24 | 108 | 250 | 83 | 1.5 | 9207 | 72.4 | 4.3 | 5.3 | 66 | 40.4 |
| ZWSMD571571-94 | 24 | 76 | 300 | 59 | 1.8 | 12676 | 78.5 | 5.5 | 6.5 | 94 | 46.5 |
| ZWSMD571571-112 | 24 | 63 | 300 | 49 | 1.8 | 15103 | 78.5 | 5.5 | 6.5 | 112 | 46.5 |
| ZWSMD571571-134 | 24 | 53 | 300 | 41 | 1.8 | 18070 | 78.5 | 5.5 | 6.5 | 134 | 46.5 |
| ZWSMD571571-159 | 24 | 45 | 300 | 35 | 1.8 | 21441 | 78.5 | 5.5 | 6.5 | 159 | 46.5 |
| ZWSMD571571-190 | 24 | 37 | 300 | 29 | 1.8 | 25622 | 78.5 | 5.5 | 6.5 | 190 | 46.5 |
| ZWSMD571571-246 | 24 | 29 | 300 | 22 | 1.8 | 33173 | 78.5 | 5.5 | 6.5 | 246 | 46.5 |
| ZWSMD571571-415 | 24 | 17 | 350 | 13 | 2.2 | 53390 | 84.6 | 5.5 | 6.5 | 415 | 52.6 |
| ZWSMD571571-592 | 24 | 12 | 350 | 9 | 2.2 | 76161 | 84.6 | 5.5 | 6.5 | 592 | 52.6 |
| ZWSMD571571-989 | 24 | 7 | 350 | 6 | 2.2 | 127235 | 84.6 | 5.5 | 6.5 | 989 | 52.6 |
| ZWSMD571571-1526 | 24 | 5 | 350 | 4 | 2.2 | 196320 | 84.6 | 5.5 | 6.5 | 1526 | 52.6 |
|
#ZHAOWEI drives system to serve the innovation market We can provide High-performance gearbox motor 6mm ,8mm,10mm,12mm,16mm,19mm,22mm,26mm,32mm,38mm,42mm |
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | High Speed |
| Excitation Mode: | Permanent Magnet |
| Function: | Control, Driving |
| Casing Protection: | Drip-Proof |
| Number of Poles: | 4 |
| Customization: |
Available
|
|
|---|

Are gear motors suitable for both heavy-duty industrial applications and smaller-scale uses?
Yes, gear motors are suitable for both heavy-duty industrial applications and smaller-scale uses. Their versatility and ability to provide torque multiplication make them valuable in a wide range of applications. Here’s a detailed explanation of why gear motors are suitable for both types of applications:
1. Heavy-Duty Industrial Applications:
Gear motors are commonly used in heavy-duty industrial applications due to their robustness and ability to handle high loads. Here are the reasons why they are suitable for such applications:
- Torque Multiplication: Gear motors are designed to provide high torque output, making them ideal for applications that require substantial force to move or operate heavy machinery, conveyors, or equipment.
- Load Handling: Industrial settings often involve heavy loads and demanding operating conditions. Gear motors, with their ability to handle high loads, are well-suited for tasks such as lifting, pulling, pushing, or driving heavy materials or equipment.
- Durability: Heavy-duty industrial applications require components that can withstand harsh environments, frequent use, and demanding operating conditions. Gear motors are typically constructed with durable materials and designed to withstand heavy vibrations, shock loads, and temperature variations.
- Speed Reduction: Many industrial processes require the reduction of motor speed to achieve the desired output speed. Gear motors offer precise speed reduction capabilities through gear ratios, allowing for optimal control and operation of machinery and equipment.
2. Smaller-Scale Uses:
While gear motors excel in heavy-duty industrial applications, they are also suitable for smaller-scale uses across various industries and applications. Here’s why gear motors are well-suited for smaller-scale uses:
- Compact Size: Gear motors are available in compact sizes, making them suitable for applications with limited space or small-scale machinery, devices, or appliances.
- Torque and Power Control: Even in smaller-scale applications, there may be a need for torque multiplication or precise power control. Gear motors can provide the necessary torque and power output for tasks such as precise positioning, controlling speed, or driving small loads.
- Versatility: Gear motors come in various configurations, such as parallel shaft, planetary, or worm gear designs, offering flexibility to match specific requirements. They can be adapted to different applications, including robotics, medical devices, automotive systems, home automation, and more.
- Efficiency: Gear motors are designed to be efficient, converting the electrical input power into mechanical output power with minimal losses. This efficiency is advantageous for smaller-scale applications where energy conservation and battery life are critical.
Overall, gear motors are highly versatile and suitable for both heavy-duty industrial applications and smaller-scale uses. Their ability to provide torque multiplication, handle high loads, offer precise speed control, and accommodate various sizes and configurations makes them a reliable choice in a wide range of applications. Whether it’s powering large industrial machinery or driving small-scale automation systems, gear motors provide the necessary torque, control, and durability required for efficient operation.

Are there environmental benefits to using gear motors in certain applications?
Yes, there are several environmental benefits associated with the use of gear motors in certain applications. Gear motors offer advantages that can contribute to increased energy efficiency, reduced resource consumption, and lower environmental impact. Here’s a detailed explanation of the environmental benefits of using gear motors:
1. Energy Efficiency:
Gear motors can improve energy efficiency in various ways:
- Torque Conversion: Gear reduction allows gear motors to deliver higher torque output while operating at lower speeds. This enables the motor to perform tasks that require high torque, such as lifting heavy loads or driving machinery with high inertia, more efficiently. By matching the motor’s power characteristics to the load requirements, gear motors can operate closer to their peak efficiency, minimizing energy waste.
- Controlled Speed: Gear reduction provides finer control over the motor’s rotational speed. This allows for more precise speed regulation, reducing the likelihood of energy overconsumption and optimizing energy usage.
2. Reduced Resource Consumption:
The use of gear motors can lead to reduced resource consumption and environmental impact:
- Smaller Motor Size: Gear reduction allows gear motors to deliver higher torque with smaller, more compact motors. This reduction in motor size translates to reduced material and resource requirements during manufacturing. It also enables the use of smaller and lighter equipment, which can contribute to energy savings during operation and transportation.
- Extended Motor Lifespan: The gear mechanism in gear motors helps reduce the load and stress on the motor itself. By distributing the load more evenly, gear motors can help extend the lifespan of the motor, reducing the need for frequent replacements and the associated resource consumption.
3. Noise Reduction:
Gear motors can contribute to a quieter and more environmentally friendly working environment:
- Noise Dampening: Gear reduction can help reduce the noise generated by the motor. The gear mechanism acts as a noise dampener, absorbing and dispersing vibrations and reducing overall noise emission. This is particularly beneficial in applications where noise reduction is important, such as residential areas, offices, or noise-sensitive environments.
4. Precision and Control:
Gear motors offer enhanced precision and control, which can lead to environmental benefits:
- Precise Positioning: Gear motors, especially stepper motors and servo motors, provide precise positioning capabilities. This accuracy allows for more efficient use of resources, minimizing waste and optimizing the performance of machinery or systems.
- Optimized Control: Gear motors enable precise control over speed, torque, and movement. This control allows for better optimization of processes, reducing energy consumption and minimizing unnecessary wear and tear on equipment.
In summary, using gear motors in certain applications can have significant environmental benefits. Gear motors offer improved energy efficiency, reduced resource consumption, noise reduction, and enhanced precision and control. These advantages contribute to lower energy consumption, reduced environmental impact, and a more sustainable approach to power transmission and control. When selecting motor systems for specific applications, considering the environmental benefits of gear motors can help promote energy efficiency and sustainability.
What is a gear motor, and how does it combine the functions of gears and a motor?
A gear motor is a type of motor that incorporates gears into its design to combine the functions of gears and a motor. It consists of a motor, which provides the mechanical power, and a set of gears, which transmit and modify this power to achieve specific output characteristics. Here’s a detailed explanation of what a gear motor is and how it combines the functions of gears and a motor:
A gear motor typically consists of two main components: the motor and the gear system. The motor is responsible for converting electrical energy into mechanical energy, generating rotational motion. The gear system, on the other hand, consists of multiple gears with different sizes and tooth configurations. These gears are meshed together in a specific arrangement to transmit and modify the output torque and speed of the motor.
The gears in a gear motor serve several functions:
1. Torque Amplification:
One of the primary functions of the gear system in a gear motor is to amplify the torque output of the motor. By using gears with different sizes, the input torque can be effectively multiplied or reduced. This allows the gear motor to provide higher torque at lower speeds or lower torque at higher speeds, depending on the gear arrangement. This torque amplification is beneficial in applications where high torque is required, such as in heavy machinery or vehicles.
2. Speed Reduction or Increase:
The gear system in a gear motor can also be used to reduce or increase the rotational speed of the motor output. By utilizing gears with different numbers of teeth, the gear ratio can be adjusted to achieve the desired speed output. For example, a gear motor with a higher gear ratio will output lower speed but higher torque, whereas a gear motor with a lower gear ratio will output higher speed but lower torque. This speed control capability allows for precise matching of motor output to the requirements of specific applications.
3. Directional Control:
Gears in a gear motor can be used to control the direction of rotation of the motor output shaft. By employing different combinations of gears, such as spur gears, bevel gears, or worm gears, the rotational direction can be changed. This directional control is crucial in applications where bidirectional movement is required, such as in conveyor systems or robotic arms.
4. Load Distribution:
The gear system in a gear motor helps distribute the load evenly across multiple gears, which reduces the stress on individual gears and increases the overall durability and lifespan of the motor. By sharing the load among multiple gears, the gear motor can handle higher torque applications without putting excessive strain on any particular gear. This load distribution capability is especially important in heavy-duty applications that require continuous operation under demanding conditions.
By combining the functions of gears and a motor, gear motors offer several advantages. They provide torque amplification, speed control, directional control, and load distribution capabilities, making them suitable for various applications that require precise and controlled mechanical power. Gear motors are commonly used in industries such as robotics, automotive, manufacturing, and automation, where reliable and efficient power transmission is essential.


editor by CX 2024-04-16
China supplier CHINAMFG MD022022-4 22mm 1875rpm 15kg. Cm 12V 24V High Torque Planetary Metal Gearbox Brush DC Gear Motor for Robot vacuum pump connector
Product Description
CHINAMFG 22MM DC Planetary metal gearbox brushless dc Gear Motor
Product Description
above specifications just for reference and customizable according to requirements.
| motor specifications:22mm brushless motor coreless motor stepper motor | |
| motors (optional) | brushless dc motor,stepper motor,coreless motor |
| voltage(optional) | 3-24v |
| input speed | <=15000rpm |
| current | 300mA max |
| performance Data:22mm Planetary Metal Gearbox brush motor / brushless motor / Stepper Motor / Coreless Motor | |||||||
| Model | Rated Speed | Max Speed | Max Rated Torque | Max Instant Torque | Reduction Ratio | Gearbox Length | Overall Length |
| rpm | rpm | gf.cm | gf.cm | mm | mm | ||
| MD571571-4 | 1875 | 7500 | 15000 | 36000 | 4 | 19.1 | 57.5 |
| MD571571-6 | 1250 | 5000 | 15000 | 36000 | 6 | 19.1 | 57.5 |
| MD571571-16 | 469 | 1875 | 15000 | 36000 | 16 | 26.4 | 64.8 |
| MD571571-24 | 313 | 1250 | 15000 | 36000 | 24 | 26.4 | 64.8 |
| MD571571-36 | 208 | 833 | 15000 | 36000 | 36 | 26.4 | 64.8 |
| MD571571-64 | 117 | 469 | 15000 | 36000 | 64 | 33.7 | 72.1 |
| MD571571-96 | 78 | 313 | 15000 | 36000 | 96 | 33.7 | 72.1 |
| MD571571-144 | 52 | 208 | 15000 | 36000 | 144 | 33.7 | 72.1 |
| MD571571-216 | 35 | 139 | 15000 | 36000 | 216 | 33.7 | 72.1 |
| MD571571-256 | 29 | 117 | 15000 | 36000 | 256 | 41 | 79.4 |
| MD571571-384 | 20 | 78 | 15000 | 36000 | 384 | 41 | 79.4 |
| MD571571-576 | 13 | 52 | 15000 | 36000 | 576 | 41 | 79.4 |
| MD571571-864 | 9 | 35 | 15000 | 36000 | 864 | 41 | 79.4 |
| MD571571-1296 | 6 | 23 | 15000 | 36000 | 1296 | 41 | 79.4 |
| * The above specifications are subject to change without prior notice. They are for reference only and can be customized as required. | |||||||
Please let us know your requirements and we will provide you with micro transmission solutions.
Product details show:
Application
| Smart wearable devices | watch,VR,AR,XR and etc. |
| Household application | kitchen appliances, sewing machines, corn popper, vacuum cleaner, garden tool, sanitary ware, window curtain, intelligent closestool, sweeping robot, power seat, standing desk, electric sofa, TV, computer, treadmill, spyhole, cooker hood, electric drawer, electric mosquito net, intelligent cupboard, intelligent wardrobe, automatic soap dispenser, UV baby bottle sterilizer, lifting hot pot cookware, dishwasher, washing machine, food breaking machine, dryer, air conditioning, dustbin, coffee machine, whisk,smart lock,bread maker,Window cleaning robot and etc. |
| communication equipment | 5G base station,video conference,mobile phone and etc. |
| Office automation equipments | scanners, printers, multifunction machines copy machines, fax (FAX paper cutter), computer peripheral, bank machine, screen, lifting socket, display,notebook PC and etc. |
| Automotive products | conditioning damper actuator, car DVD,door lock actuator, retractable rearview mirror, meters, optic axis control device, head light beam level adjuster, car water pump, car antenna, lumbar support, EPB, car tail gate electric putter, HUD, head-up display, vehicle sunroof, EPS, AGS, car window, head restraint, E-booster, car seat, vehicle charging station and etc. |
| Toys and models | radio control model, automatic cruise control, ride-on toy, educational robot, programming robot, medical robot, automatic feeder, intelligent building blocks, escort robot and etc. |
| Medical equipments | blood pressure meter, breath machine, medical cleaning pump, medical bed, blood pressure monitors, medical ventilator, surgical staplers, infusion pump, dental instrument, self-clotting cutter, wound cleaning pump for orthopedic surgery,electronic cigarette, eyebrow pencil,fascia gun, , surgical robot,laboratory automation and etc. |
| Industrials | flow control valves, seismic testing,automatic reclosing,Agricultural unmanned aerial vehicle,automatic feeder ,intelligent express cabinet and etc. |
| Electric power tools | electric drill, screwdriver,garden tool and etc. |
| Precision instruments | optics instruments,automatic vending machine, wire-stripping machine and etc. |
| Personal care | tooth brush, hair clipper, electric shaver, massager, vibrator, hair dryer, rubdown machine, scissor hair machine, foot grinder,anti-myopia pen, facial beauty equipment, hair curler,Electric threading knife,POWER PERFECT PORE, Puff machine,eyebrow tweezers and etc. |
| Consumer electronics | camera, mobile phone,digital camera, automatic retracting device,camcorder, kinescope DVD,headphone stereo, cassette tape recorder, bluetooth earbud charging case, turntable, tablet,UAV(unmanned aerial vehicle),surveillance camera,PTZ camera, rotating smart speaker and etc. |
| robots | educational robot, programming robot, medical robot, escort robot and etc. |
Company Profile
HangZhou CHINAMFG Machinery & Electronics Co., Ltd was established in 2001,We provide the total drive solution for customers from design, tooling fabrication, components manufacturing and assembly.
Workshop
Testing Equipment
1) Competitive Advantages
- 1) Competitive Advantages
19+year experience in manufacturing motor gearbox
We provide technical support from r&d, prototype, testing, assembly and serial production , ODM &OEM
Competitive Price
Product Performance: Low noise, High efficiency, Long lifespan
Prompt Delivery: 15 working days after payment
Small Orders Accepted
2) Main Products
-
Precision reduction gearbox and its diameter:3.4mm-38mm,voltage:1.5-24V,power: 0.01-40W,output speed:5-2000rpm and output torque:1.0 gf.cm -50kgf.cm,
- Customized worm and gear transmission machinery;
- Precise electromechanical motion module;
- Precise component and assembly of plastic and metal powder injection.
Our Services
- ODM & OEM
- Gearbox design and development
- Related technology support
- Micro drive gearbox custom solution
Packaging & Shipping
1) Packing Details
packed in nylon firstly, then carton, and then reinforced with wooden case for outer packing.
Or according to client’s requirement.
2) Shipping Details
samples will be shipped within 10 days;
batch order leading time according to the actual situation.
Certifications
Certifications
We Have passed to hold ISO9001:2015(CN11/3571),ISO14001:2004(U006616E0153R3M), ISO13485:2016(CN18/42018) and IATF16949:2016(CN11/3571.01).
and more…
FAQ
FAQ
1. Can you make the gearbox with custom specifications?
YES. We have design and development team, also a great term of engineers, each of them have
many work years experience.
2.Do you provide the samples?
YES. Our company can provide the samples to you, and the delivery time is about 5-15days according to the specification of gearbox you need.
3.What is your MOQ?
Our MOQ is 2000pcs. But at the beginning of our business, we accept small order.
4. Do you have the item in stock?
I am sorry we donot have the item in stock, All products are made with orders.
5. Do you provide technology support?
YES. Our company have design and development team, we can provide technology support if you
need.
6.How to ship to us?
We will ship the goods to you according to the DHL or UPS or FEDEX etc account you provide.
7.How to pay the money?
We accept T/T in advance. Also we have different bank account for receiving money, like US dollors or RMB etc.
8. How can I know the product is suitable for me?
Frist, you need to provide us the more details information about the product. We will recommend the item to you according to your requirement of specification. After you confirm, we will prepare the samples to you. also we will offer some good advances according to your product use.
9. Can I come to your company to visit?
YES, you can come to our company to visit at anytime, and welcome to visit our company.
10. How do contact us ?
Please send an inquiry
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | High Speed |
| Excitation Mode: | Permanent Magnet |
| Function: | Control, Driving |
| Casing Protection: | Drip-Proof |
| Number of Poles: | 4 |
| Customization: |
Available
|
|
|---|
Are there innovations or emerging technologies in the field of gear motor design?
Yes, there are several innovations and emerging technologies in the field of gear motor design. These advancements aim to improve the performance, efficiency, compactness, and reliability of gear motors. Here are some notable innovations and emerging technologies in gear motor design:
1. Miniaturization and Compact Design:
Advancements in manufacturing techniques and materials have enabled the miniaturization of gear motors without compromising their performance. Gear motors with compact designs are highly sought after in applications where space is limited, such as robotics, medical devices, and consumer electronics. Innovative approaches like micro-gear motors and integrated motor-gear units are being developed to achieve smaller form factors while maintaining high torque and efficiency.
2. High-Efficiency Gearing:
New gear designs focus on improving efficiency by reducing friction and mechanical losses. Advanced gear manufacturing techniques, such as precision machining and 3D printing, allow for the creation of intricate gear tooth profiles that optimize power transmission and minimize losses. Additionally, the use of high-performance materials, coatings, and lubricants helps reduce friction and wear, improving overall gear motor efficiency.
3. Magnetic Gearing:
Magnetic gearing is an emerging technology that replaces traditional mechanical gears with magnetic fields to transmit torque. It utilizes the interaction of permanent magnets to transfer power, eliminating the need for physical gear meshing. Magnetic gearing offers advantages such as high efficiency, low noise, compactness, and maintenance-free operation. While still being developed and refined, magnetic gearing holds promise for various applications, including gear motors.
4. Integrated Electronics and Controls:
Gear motor designs are incorporating integrated electronics and controls to enhance performance and functionality. Integrated motor drives and controllers simplify system integration, reduce wiring complexity, and allow for advanced control features. These integrated solutions offer precise speed and torque control, intelligent feedback mechanisms, and connectivity options for seamless integration into automation systems and IoT (Internet of Things) platforms.
5. Smart and Condition Monitoring Capabilities:
New gear motor designs incorporate smart features and condition monitoring capabilities to enable predictive maintenance and optimize performance. Integrated sensors and monitoring systems can detect abnormal operating conditions, track performance parameters, and provide real-time feedback for proactive maintenance and troubleshooting. This helps prevent unexpected failures, extend the lifespan of gear motors, and improve overall system reliability.
6. Energy-Efficient Motor Technologies:
Gear motor design is influenced by advancements in energy-efficient motor technologies. Brushless DC (BLDC) motors and synchronous reluctance motors (SynRM) are gaining popularity due to their higher efficiency, better power density, and improved controllability compared to traditional brushed DC and induction motors. These motor technologies, when combined with optimized gear designs, contribute to overall system energy savings and performance improvements.
These are just a few examples of the innovations and emerging technologies in gear motor design. The field is continuously evolving, driven by the need for more efficient, compact, and reliable motion control solutions in various industries. Gear motor manufacturers and researchers are actively exploring new materials, manufacturing techniques, control strategies, and system integration approaches to meet the evolving demands of modern applications.
What is the significance of gear reduction in gear motors, and how does it affect efficiency?
Gear reduction plays a significant role in gear motors as it enables the motor to deliver higher torque while reducing the output speed. This feature has several important implications for gear motors, including enhanced power transmission, improved control, and potential trade-offs in terms of efficiency. Here’s a detailed explanation of the significance of gear reduction in gear motors and its effect on efficiency:
Significance of Gear Reduction:
1. Increased Torque: Gear reduction allows gear motors to generate higher torque output compared to a motor without gears. By reducing the rotational speed at the output shaft, gear reduction increases the mechanical advantage of the system. This increased torque is beneficial in applications that require high torque to overcome resistance, such as lifting heavy loads or driving machinery with high inertia.
2. Improved Control: Gear reduction enhances the control and precision of gear motors. By reducing the speed, gear reduction allows for finer control over the motor’s rotational movement. This is particularly important in applications that require precise positioning or accurate speed control. The gear reduction mechanism enables gear motors to achieve smoother and more controlled movements, reducing the risk of overshooting or undershooting the desired position.
3. Load Matching: Gear reduction helps match the motor’s power characteristics to the load requirements. Different applications have varying torque and speed requirements. Gear reduction allows the gear motor to achieve a better match between the motor’s power output and the specific requirements of the load. It enables the motor to operate closer to its peak efficiency by optimizing the torque-speed trade-off.
Effect on Efficiency:
While gear reduction offers several advantages, it can also affect the efficiency of gear motors. Here’s how gear reduction impacts efficiency:
1. Mechanical Efficiency: The gear reduction process introduces mechanical components such as gears, bearings, and lubrication systems. These components introduce additional friction and mechanical losses into the system. As a result, some energy is lost in the form of heat during the gear reduction process. The efficiency of the gear motor is influenced by the quality of the gears, the lubrication used, and the overall design of the gear system. Well-designed and properly maintained gear systems can minimize these losses and optimize mechanical efficiency.
2. System Efficiency: Gear reduction affects the overall system efficiency by impacting the motor’s electrical efficiency. In gear motors, the motor typically operates at higher speeds and lower torques compared to a direct-drive motor. The overall system efficiency takes into account both the electrical efficiency of the motor and the mechanical efficiency of the gear system. While gear reduction can increase the torque output, it also introduces additional losses due to increased mechanical complexity. Therefore, the overall system efficiency may be lower compared to a direct-drive motor for certain applications.
It’s important to note that the efficiency of gear motors is influenced by various factors beyond gear reduction, such as motor design, control systems, and operating conditions. The selection of high-quality gears, proper lubrication, and regular maintenance can help minimize losses and improve efficiency. Additionally, advancements in gear technology, such as the use of precision gears and improved lubricants, can contribute to higher overall efficiency in gear motors.
In summary, gear reduction is significant in gear motors as it provides increased torque, improved control, and better load matching. However, gear reduction can introduce mechanical losses and affect the overall efficiency of the system. Proper design, maintenance, and consideration of application requirements are essential to optimize the balance between torque, speed, and efficiency in gear motors.
Are there specific considerations for selecting the right gear motor for a particular application?
When selecting a gear motor for a specific application, several considerations need to be taken into account. The choice of the right gear motor is crucial to ensure optimal performance, efficiency, and reliability. Here’s a detailed explanation of the specific considerations for selecting the right gear motor for a particular application:
1. Torque Requirement:
The torque requirement of the application is a critical factor in gear motor selection. Determine the maximum torque that the gear motor needs to deliver to perform the required tasks. Consider both the starting torque (the torque required to initiate motion) and the operating torque (the torque required to sustain motion). Select a gear motor that can provide adequate torque to handle the load requirements of the application. It’s important to account for any potential torque spikes or variations during operation.
2. Speed Requirement:
Consider the desired speed range or specific speed requirements of the application. Determine the rotational speed (in RPM) that the gear motor needs to achieve to meet the application’s performance criteria. Select a gear motor with a suitable gear ratio that can achieve the desired speed at the output shaft. Ensure that the gear motor can maintain the required speed consistently and accurately throughout the operation.
3. Duty Cycle:
Evaluate the duty cycle of the application, which refers to the ratio of operating time to rest or idle time. Consider whether the application requires continuous operation or intermittent operation. Determine the duty cycle’s impact on the gear motor, including factors such as heat generation, cooling requirements, and potential wear and tear. Select a gear motor that is designed to handle the expected duty cycle and ensure long-term reliability and durability.
4. Environmental Factors:
Take into account the environmental conditions in which the gear motor will operate. Consider factors such as temperature extremes, humidity, dust, vibrations, and exposure to chemicals or corrosive substances. Choose a gear motor that is specifically designed to withstand and perform optimally under the anticipated environmental conditions. This may involve selecting gear motors with appropriate sealing, protective coatings, or materials that can resist corrosion and withstand harsh environments.
5. Efficiency and Power Requirements:
Consider the desired efficiency and power consumption of the gear motor. Evaluate the power supply available for the application and select a gear motor that operates within the specified voltage and current ranges. Assess the gear motor’s efficiency to ensure that it maximizes power transmission and minimizes wasted energy. Choosing an efficient gear motor can contribute to cost savings and reduced environmental impact.
6. Physical Constraints:
Assess the physical constraints of the application, including space limitations, mounting options, and integration requirements. Consider the size, dimensions, and weight of the gear motor to ensure it can be accommodated within the available space. Evaluate the mounting options and compatibility with the application’s mechanical structure. Additionally, consider any specific integration requirements, such as shaft dimensions, connectors, or interfaces that need to align with the application’s design.
7. Noise and Vibration:
Depending on the application, noise and vibration levels may be critical factors. Evaluate the acceptable noise and vibration levels for the application’s environment and operation. Choose a gear motor that is designed to minimize noise and vibration, such as those with helical gears or precision engineering. This is particularly important in applications that require quiet operation or where excessive noise and vibration may cause issues or discomfort.
By considering these specific factors when selecting a gear motor for a particular application, you can ensure that the chosen gear motor meets the performance requirements, operates efficiently, and provides reliable and consistent power transmission. It’s important to consult with gear motor manufacturers or experts to determine the most suitable gear motor based on the specific application’s needs.
editor by CX 2024-04-04
China manufacturer High Torque DC Planetary Gearbox Motor Gear Motor with Aluminum Bracket for Electric String Trimmer with Hot selling
Product Description
Quiet stable and reliable for long life operation
| Motor type | 63ZYT-125-24 | |
| Protection grade | IP50 | |
| Duty cycle | S1 (100%) | |
| Rated voltage | 24 | V |
| Rated current | 4.9 | A |
| Input power | 117.6 | W |
| No-load current | 0.4 | A |
| Rated torque | 0.27 | Nm |
| Rated speed | 3300 | ±10% rpm |
| Rated output power | 93.3 | W |
| Friction torque | 2 | Ncm |
| efficiency | 80% | |
| Maximum torque | 1.3 | ±10% Nm |
| Maximum current | 23 | A |
| No-load speed | 3650 | ±10% rpm |
| Maximum power | 245 | W |
| Maximum shell temperature | 85 | ºC |
| Weight | 1.7 | Kg |
| Planetary gear box | F1130 | |
| Protection grade | IP65 | |
| Reduction ratio | 710.5:1 | |
| Rated torque | 120 | Nm |
| Maximum torque | 180 | Nm |
| Ambient temperature | -20 to 85 | ºC |
| Grease Smart | Smart top 28 | |
| Grease temperature range | -20 to 160 | ºC |
| Function: | Control, Driving |
|---|---|
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Certification: | ISO9001, CCC, CE |
| Brand: | Jintian |
| Power: | 117.6W |
| Samples: |
US$ 162/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|

Benefits of a Planetary Motor
Besides being one of the most efficient forms of a drive, a Planetary Motor also offers a great number of other benefits. These features enable it to create a vast range of gear reductions, as well as generate higher torques and torque density. Let’s take a closer look at the benefits this mechanism has to offer. To understand what makes it so appealing, we’ll explore the different types of planetary systems.
Solar gear
The solar gear on a planetary motor has two distinct advantages. It produces less noise and heat than a helical gear. Its compact footprint also minimizes noise. It can operate at high speeds without sacrificing efficiency. However, it must be maintained with constant care to operate efficiently. Solar gears can be easily damaged by water and other debris. Solar gears on planetary motors may need to be replaced over time.
A planetary gearbox is composed of a sun gear and two or more planetary ring and spur gears. The sun gear is the primary gear and is driven by the input shaft. The other two gears mesh with the sun gear and engage the stationary ring gear. The three gears are held together by a carrier, which sets the spacing. The output shaft then turns the planetary gears. This creates an output shaft that rotates.
Another advantage of planetary gears is that they can transfer higher torques while being compact. These advantages have led to the creation of solar gears. They can reduce the amount of energy consumed and produce more power. They also provide a longer service life. They are an excellent choice for solar-powered vehicles. But they must be installed by a certified solar energy company. And there are other advantages as well. When you install a solar gear on a planetary motor, the energy produced by the sun will be converted to useful energy.
A solar gear on a planetary motor uses a solar gear to transmit torque from the sun to the planet. This system works on the principle that the sun gear rotates at the same rate as the planet gears. The sun gear has a common design modulus of -Ns/Np. Hence, a 24-tooth sun gear equals a 3-1/2 planet gear ratio. When you consider the efficiency of solar gears on planetary motors, you will be able to determine whether the solar gears are more efficient.
Sun gear
The mechanical arrangement of a planetary motor comprises of two components: a ring gear and a sun gear. The ring gear is fixed to the motor’s output shaft, while the sun gear rolls around and orbits around it. The ring gear and sun gear are linked by a planetary carrier, and the torque they produce is distributed across their teeth. The planetary structure arrangement also reduces backlash, and is critical to achieve a quick start and stop cycle.
When the two planetary gears rotate independently, the sun gear will rotate counterclockwise and the ring-gear will turn in the same direction. The ring-gear assembly is mounted in a carrier. The carrier gear and sun gear are connected to each other by a shaft. The planetary gears and sun gear rotate around each other on the ring-gear carrier to reduce the speed of the output shaft. The planetary gear system can be multiplied or staged to obtain a higher reduction ratio.
A planetary gear motor mimics the planetary rotation system. The input shaft turns a central gear, known as the sun gear, while the planetary gears rotate around a stationary sun gear. The motor’s compact design allows it to be easily mounted to a vehicle, and its low weight makes it ideal for small vehicles. In addition to being highly efficient, a planetary gear motor also offers many other benefits.
A planetary gearbox uses a sun gear to provide torque to the other gears. The planet pinions mesh with an internal tooth ring gear to generate rotation. The carrier also acts as a hub between the input gear and output shaft. The output shaft combines these two components, giving a higher torque. There are three types of planetary gearboxes: the sun gear and a wheel drive planetary gearbox.
Planetary gear
A planetary motor gear works by distributing rotational force along a separating plate and a cylindrical shaft. A shock-absorbing device is included between the separating plate and cylindrical shaft. This depressed portion prevents abrasion wear and foreign particles from entering the device. The separating plate and shaft are positioned coaxially. In this arrangement, the input shaft and output shaft are rotated relative to one another. The rotatable disc absorbs the impact.
Another benefit of a planetary motor gear is its efficiency. Planetary motor gears are highly efficient at transferring power, with 97% of the input energy being transferred to the output. They can also have high gear ratios, and offer low noise and backlash. This design also allows the planetary gearbox to work with electric motors. In addition, planetary gears also have a long service life. The efficiency of planetary gears is due in part to the large number of teeth.
Other benefits of a planetary motor gear include the ease of changing ratios, as well as the reduced safety stock. Unlike other gears, planetary gears don’t require special tools for changing ratios. They are used in numerous industries, and share parts across multiple sizes. This means that they are cost-effective to produce and require less safety stock. They can withstand high shock and wear, and are also compact. If you’re looking for a planetary motor gear, you’ve come to the right place.
The axial end surface of a planetary gear can be worn down by abrasion with a separating plate. In addition, foreign particles may enter the planetary gear device. These particles can damage the gears or even cause noise. As a result, you should check planetary gears for damage and wear. If you’re looking for a gear, make sure it has been thoroughly tested and installed by a professional.
Planetary gearbox
A planetary motor and gearbox are a common combination of electric and mechanical power sources. They share the load of rotation between multiple gear teeth to increase the torque capacity. This design is also more rigid, with low backlash that can be as low as one or two arc minutes. The advantages of a planetary gearmotor over a conventional electric motor include compact size, high efficiency, and less risk of gear failure. Planetary gear motors are also more reliable and durable than conventional electric motors.
A planetary gearbox is designed for a single stage of reduction, or a multiple-stage unit can be built with several individual cartridges. Gear ratios may also be selected according to user preference, either to face mount the output stage or to use a 5mm hex shaft. For multi-stage planetary gearboxes, there are a variety of different options available. These include high-efficiency planetary gearboxes that achieve a 98% efficiency at single reduction. In addition, they are noiseless, and reduce heat loss.
A planetary gearbox may be used to increase torque in a robot or other automated system. There are different types of planetary gear sets available, including gearboxes with sliding or rolling sections. When choosing a planetary gearset, consider the environment and other factors such as backlash, torque, and ratio. There are many advantages to a planetary gearbox and the benefits and drawbacks associated with it.
Planetary gearboxes are similar to those in a solar system. They feature a central sun gear in the middle, two or more outer gears, and a ring gear at the output. The planetary gears rotate in a ring-like structure around a stationary sun gear. When the gears are engaged, they are connected by a carrier that is fixed to the machine’s shaft.
Planetary gear motor
Planetary gear motors reduce the rotational speed of an armature by one or more times. The reduction ratio depends on the structure of the planetary gear device. The planetary gear device has an output shaft and an armature shaft. A separating plate separates the two. The output shaft moves in a circular pattern to turn the pinion 3. When the pinion rotates to the engagement position, it is engaged with the ring gear 4. The ring gear then transmits the rotational torque to the armature shaft. The result is that the engine cranks up.
Planetary gear motors are cylindrical in shape and are available in various power levels. They are typically made of steel or brass and contain multiple gears that share the load. These motors can handle massive power transfers. The planetary gear drive, on the other hand, requires more components, such as a sun’s gear and multiple planetary gears. Consequently, it may not be suitable for all types of applications. Therefore, the planetary gear drive is generally used for more complex machines.
Brush dusts from the electric motor may enter the planetary gear device and cause it to malfunction. In addition, abrasion wear on the separating plate can affect the gear engagement of the planetary gear device. If this occurs, the gears will not engage properly and may make noise. In order to prevent such a situation from occurring, it is important to regularly inspect planetary gear motors and their abrasion-resistant separating plates.
Planetary gear motors come in many different power levels and sizes. These motors are usually cylindrical in shape and are made of steel, brass, plastic, or a combination of both materials. A planetary gear motor can be used in applications where space is an issue. This motor also allows for low gearings in small spaces. The planetary gearing allows for large amounts of power transfer. The output shaft size is dependent on the gear ratio and the motor speed.
editor by CX 2023-11-09
China Custom 36mm Planetary Gearbox 120rpm 12V DC Gear Motor High Torque Low Rpm Motors for Robots with Best Sales
Product Description
Quiet stable and reliable for long life operation
| Motor type | 63ZYT-125-24 | |
| Protection grade | IP50 | |
| Duty cycle | S1 (100%) | |
| Rated voltage | 24 | V |
| Rated current | 4.9 | A |
| Input power | 117.6 | W |
| No-load current | 0.4 | A |
| Rated torque | 0.27 | Nm |
| Rated speed | 3300 | ±10% rpm |
| Rated output power | 93.3 | W |
| Friction torque | 2 | Ncm |
| efficiency | 80% | |
| Maximum torque | 1.3 | ±10% Nm |
| Maximum current | 23 | A |
| No-load speed | 3650 | ±10% rpm |
| Maximum power | 245 | W |
| Maximum shell temperature | 85 | ºC |
| Weight | 1.7 | Kg |
| Planetary gear box | F1130 | |
| Protection grade | IP65 | |
| Reduction ratio | 710.5:1 | |
| Rated torque | 120 | Nm |
| Maximum torque | 180 | Nm |
| Ambient temperature | -20 to 85 | ºC |
| Grease Smart | Smart top 28 | |
| Grease temperature range | -20 to 160 | ºC |
| Function: | Control, Driving |
|---|---|
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Certification: | ISO9001, CCC, CE |
| Brand: | Jintian |
| Power: | 117.6W |
| Samples: |
US$ 162/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|

How to Assemble a Planetary Motor
A Planetary Motor uses multiple planetary surfaces to produce torque and rotational speed. The planetary system allows for a wide range of gear reductions. Planetary systems are particularly effective in applications where higher torques and torque density are needed. As such, they are a popular choice for electric vehicles and other applications where high-speed mobility is required. Nevertheless, there are many benefits associated with using a planetary motor. Read on to learn more about these motors.
VPLite
If you’re looking to replace the original VP, the VPLite has a similar output shaft as the original. This means that you can mix and match your original gear sets, including the input and output shafts. You can even mix metal inputs with plastic outputs. Moreover, if you decide to replace the gearbox, you can easily disassemble the entire unit and replace it with a new one without losing any output torque.
Compared to a planetary motor, a spur gear motor uses fewer gears and is therefore cheaper to produce. However, the latter isn’t suitable for high-torque applications. The torque produced by a planetary gearmotor is evenly distributed, which makes it ideal for applications that require higher torque. However, you may have to compromise on the torque output if you’re looking for a lightweight option.
The VersaPlanetary Lite gearbox replaces the aluminum ring gear with a 30% glass-filled nylon gear. This gearbox is available in two sizes, which means you can mix and match parts to get a better gear ratio. The VPLite gearbox also has a female 5mm hex output shaft. You can mix and match different gearboxes and planetary gearboxes for maximum efficiency.
VersaPlanetary
The VersaPlanetary is a highly versatile planetary motor that can be mounted in a variety of ways. Its unique design includes a removable shaft coupler system that makes it simple to swap out the motor with another. This planetary motor mounts in any position where a CIM motor mounts. Here’s how to assemble the motor. First, remove the hex output shaft from the VersaPlanetary output stage. Its single ring clip holds it in place. You can use a drill press to drill a hole into the output shaft.
After mounting the gearbox, you can then mount the motor. The mounting hardware included with the VersaPlanetary Planetary Motor comes with four 10-32 threaded holes on a two-inch bolt circle. You can use these holes to mount your VersaPlanetary on a CIM motor or a CIM-compatible motor. Once assembled, the VersaPlanetary gearbox has 72 different gear ratios.
The VersaPlanetary gearbox is interchangeable with regular planetary gearboxes. However, it does require additional parts. You can purchase a gearbox without the motor but you’ll need a pinion. The pinion attaches to the shaft of the motor. The gearbox is very sturdy and durable, so you won’t have to worry about it breaking or wearing out.
Self-centering planetary gears
A planetary motor is a simple mechanical device that rotates around a axis, with the planets moving around the shaft in a radial direction. The planets are positioned so that they mesh with both the sun gear and the output gears. The carrier 48 is flexibly connected to the drive shaft and can move depending on the forces exerted by the planet gears. In this way, the planets can always be in the optimal mesh with the output gears and sun gear.
The first step in developing a planetary gear motor is to identify the number of teeth in each planet. The number of teeth should be an integer. The tooth diameters of the planets should mesh with each other and the ring. Typically, the teeth of one planet must mesh with each other, but the spacing between them must be equal or greater than the other. This can be achieved by considering the tooth count of each planet, as well as the spacing between planets.
A second step is to align the planet gears with the output gears. In a planetary motor, self-centering planetary gears must be aligned with both input and output gears to provide maximum torque. For this to be possible, the planet gears must be connected with the output shaft and the input shaft. Similarly, the output shaft should also be able to align with the input gear.
Encoders
A planetary geared motor is a DC motor with a planetary gearbox. The motor can be used to drive heavy loads and has a ratio of 104:1. The shaft speed is 116rpm when it is unloaded. A planetary gearbox has a low backlash and is often used in applications that need high torque. Planetary Motor encoders can help you keep track of your robot’s position or speed.
They are also able to control motor position and speed with precision. Most of them feature high resolution. A 0.18-degree resolution encoder will give you a minimum of 2000 transitions per rotation between outputs A and B. The encoder is built to industrial standards and has a sturdy gearbox to avoid damage. The encoder’s robust design means it will not stall when the motor reaches its maximum speed.
There are many advantages to a planetary motor encoder. A high-quality one will not lose its position or speed even if it’s subject to shocks. A good quality planetary motor will also last a long time. Planetary motors are great for resale or for your own project. If you’re considering buying a planetary motor, consider this information. It’ll help you decide if a particular model is right for your needs.
Cost
There are several advantages of planetary motors. One of the biggest is their cost, but they can also be used in many different applications. They can be combined with a variety of gearboxes, and are ideal for various types of robots, laboratory automation, and production applications. Planetary gearboxes are available in many different materials, and plastic planetary gearboxes are an economical alternative. Plastic gearboxes reduce noise at higher speeds, and steel input stage gears are available for high torques. A modified lubrication system can help with difficult operating conditions.
In addition to being more durable, planetary motors are much more efficient. They use fewer gears, which lowers the overall cost of production. Depending on the application, a planetary motor can be used to move a heavy object, but is generally less expensive than its counterpart. It is a better choice for situations where the load is relatively low and the motor is not used frequently. If you need a very high torque output, a planetary motor may be the better option.
Planetary gear units are a good choice for applications requiring high precision, high dynamics, and high torque density. They can be designed and built using TwinCAT and TC Motion Designer, and are delivered as complete motor and gear unit assemblies. In a few simple steps, you can calculate the torque required and compare the costs of different planetary gear units. You can then choose the best model for your application. And because planetary gear units are so efficient, they are a great option for high-end industrial applications.
Applications
There are several different applications of the planetary motor. One such application is in motion control. Planetary gearboxes have many benefits, including high torque, low backlash, and torsional stiffness. They also have an extremely compact design, and can be used for a variety of applications, from rack and pinion drives to delta robotics. In many cases, they are less expensive to manufacture and use than other types of motors.
Another application for planetary gear units is in rotary tables. These machines require high precision and low backlash for their precise positioning. Planetary gears are also necessary for noise reduction, which is a common feature in rotary tables. High precision planetary gears can make the height adjustment of OP tables a breeze. And because they are extremely durable and require low noise, they are a great choice for this application. In this case, the planetary gear is matched with an AM8000 series servomotor, which gives a wide range of choices.
The planetary gear transmission is also widely used in helicopters, automobiles, and marine applications. It is more advanced than a countershaft drive, and is capable of higher torque to weight ratios. Other advantages include its compact design and reduced noise. A key concern in the development of this type of transmission is to minimize vibration. If the output of a planetary gear transmission system is loud, the vibration caused by this type of drive system may be too loud for comfort.
editor by CX 2023-05-31
China Hot selling DC Gearbox Electric Permant Magnet Planetary Gear Motor with High Torque for Medical Equipment brushless motor
Product Description
| 16ZYJ DC Gear Motor | |||||
| Basic Info | |||||
| Item | Data | ||||
| Tem Rise | 40K | ||||
| Working Tem | (-20ºC~+80ºC) | ||||
| Insulation Resistance | 100MΩ min 500VDC | ||||
| Surge Test | 500VAC for 1min | ||||
| Insulation Class | E | ||||
| Weight | 45g | ||||
| Specification | |||||||||||
| PN | Rated Voltage | Initial Speed | Ratio | Power | Noload Speed | Noload Current | Rated Speed | Rated Current | Rated Torque | Stall Torque | Stall Current |
| V DC | rpm | 1:xxx | W | rpm | mA | rpm | mA | Kg.cm | Kg.cm | mA | |
| 16ZYJ-75A | 3 | 7500 | 100 | 2.2 | 75 | 80 | 60 | 150 | 1.8 | 3 | 600 |
| 16ZYJ-100A | 6 | 15000 | 150 | 2.2 | 100 | 80 | 130 | 160 | 2 | 3.5 | 600 |
| 16ZYJ-500A | 9 | 15000 | 30 | 2.2 | 500 | 80 | 400 | 200 | 1 | 2 | 600 |
Probond motors designs brush, brushless, stepper, hysteresis and linear motors to meet customers requirements.
Our motors use standard and special components with customer selected torque/speed requirements that can be modified to your applications.
The AC/DC gear motors are based upon to distinct magetic circuits that optimize motor design for high speed low torque and low speed high torque.
These motors give you lower rotational losses, excellent thermal transfer, interchangeable end caps, easily sealed. Options include connectors, encoders, shaft modifications, dimensional changes, etc.
Probond motor owns professional sales team and engineer team with more than 10 years experience in motor industry, based on China mainland handling overseas business for years, we know your needs better than others.
Probond Sonicare Toothbrush Motor and Thermostatic Valve Hysteresis Motor are our hot products on sell in 2017 with highly quality level and competitive price.
Please kindly contact us to get a catalogue.
Shipping&Payment
| Terms of price | FOB,CIF,CFR,EXW,DDP,etc. |
| Terms of payment | 100% T/T in advance for samples |
| Bulk quantity payment way can be negotited |
|
| Warranty | 12 months limited warranty once the items are delivered to the buyer. |
| Lead time | Usually within 2 weeks for trial orders, within 3 weeks for bulk orders. |
| Package | Carton o plywood pallet. |
| Place of loading | ZheJiang , HangZhou, etc. |
| Shipment carrier | Items are usually shipped via Fedex,DHL,TNT,UPS,EMS for trial orders and via vessel for bulk orders. |
| Delivery time | Usually within 5 working days by Express 15-30 working days by vessel |
Our promise to our Customers:
1. Answer customer’s inquiry within 2 working days.
2. Reply to our customer questions & Concerns within 3 working days.
3. Acknowledge Customer purchase orders within 24 hours.
4. Standard Lead time is within 4 weeks. Respond to special product development within 15 weeks.
5. Flexible delivery methods: By air, sea and express carrier using the customer’s forwarder.
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools, Robot |
|---|---|
| Operating Speed: | High Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Open Type |
| Number of Poles: | 6 |
| Samples: |
US$ 10/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|
Benefits of a Planetary Motor
Besides being one of the most efficient forms of a drive, a Planetary Motor also offers a great number of other benefits. These features enable it to create a vast range of gear reductions, as well as generate higher torques and torque density. Let’s take a closer look at the benefits this mechanism has to offer. To understand what makes it so appealing, we’ll explore the different types of planetary systems.
Solar gear
The solar gear on a planetary motor has two distinct advantages. It produces less noise and heat than a helical gear. Its compact footprint also minimizes noise. It can operate at high speeds without sacrificing efficiency. However, it must be maintained with constant care to operate efficiently. Solar gears can be easily damaged by water and other debris. Solar gears on planetary motors may need to be replaced over time.
A planetary gearbox is composed of a sun gear and two or more planetary ring and spur gears. The sun gear is the primary gear and is driven by the input shaft. The other two gears mesh with the sun gear and engage the stationary ring gear. The three gears are held together by a carrier, which sets the spacing. The output shaft then turns the planetary gears. This creates an output shaft that rotates.
Another advantage of planetary gears is that they can transfer higher torques while being compact. These advantages have led to the creation of solar gears. They can reduce the amount of energy consumed and produce more power. They also provide a longer service life. They are an excellent choice for solar-powered vehicles. But they must be installed by a certified solar energy company. And there are other advantages as well. When you install a solar gear on a planetary motor, the energy produced by the sun will be converted to useful energy.
A solar gear on a planetary motor uses a solar gear to transmit torque from the sun to the planet. This system works on the principle that the sun gear rotates at the same rate as the planet gears. The sun gear has a common design modulus of -Ns/Np. Hence, a 24-tooth sun gear equals a 3-1/2 planet gear ratio. When you consider the efficiency of solar gears on planetary motors, you will be able to determine whether the solar gears are more efficient.
Sun gear
The mechanical arrangement of a planetary motor comprises of two components: a ring gear and a sun gear. The ring gear is fixed to the motor’s output shaft, while the sun gear rolls around and orbits around it. The ring gear and sun gear are linked by a planetary carrier, and the torque they produce is distributed across their teeth. The planetary structure arrangement also reduces backlash, and is critical to achieve a quick start and stop cycle.
When the two planetary gears rotate independently, the sun gear will rotate counterclockwise and the ring-gear will turn in the same direction. The ring-gear assembly is mounted in a carrier. The carrier gear and sun gear are connected to each other by a shaft. The planetary gears and sun gear rotate around each other on the ring-gear carrier to reduce the speed of the output shaft. The planetary gear system can be multiplied or staged to obtain a higher reduction ratio.
A planetary gear motor mimics the planetary rotation system. The input shaft turns a central gear, known as the sun gear, while the planetary gears rotate around a stationary sun gear. The motor’s compact design allows it to be easily mounted to a vehicle, and its low weight makes it ideal for small vehicles. In addition to being highly efficient, a planetary gear motor also offers many other benefits.
A planetary gearbox uses a sun gear to provide torque to the other gears. The planet pinions mesh with an internal tooth ring gear to generate rotation. The carrier also acts as a hub between the input gear and output shaft. The output shaft combines these two components, giving a higher torque. There are three types of planetary gearboxes: the sun gear and a wheel drive planetary gearbox.
Planetary gear
A planetary motor gear works by distributing rotational force along a separating plate and a cylindrical shaft. A shock-absorbing device is included between the separating plate and cylindrical shaft. This depressed portion prevents abrasion wear and foreign particles from entering the device. The separating plate and shaft are positioned coaxially. In this arrangement, the input shaft and output shaft are rotated relative to one another. The rotatable disc absorbs the impact.
Another benefit of a planetary motor gear is its efficiency. Planetary motor gears are highly efficient at transferring power, with 97% of the input energy being transferred to the output. They can also have high gear ratios, and offer low noise and backlash. This design also allows the planetary gearbox to work with electric motors. In addition, planetary gears also have a long service life. The efficiency of planetary gears is due in part to the large number of teeth.
Other benefits of a planetary motor gear include the ease of changing ratios, as well as the reduced safety stock. Unlike other gears, planetary gears don’t require special tools for changing ratios. They are used in numerous industries, and share parts across multiple sizes. This means that they are cost-effective to produce and require less safety stock. They can withstand high shock and wear, and are also compact. If you’re looking for a planetary motor gear, you’ve come to the right place.
The axial end surface of a planetary gear can be worn down by abrasion with a separating plate. In addition, foreign particles may enter the planetary gear device. These particles can damage the gears or even cause noise. As a result, you should check planetary gears for damage and wear. If you’re looking for a gear, make sure it has been thoroughly tested and installed by a professional.
Planetary gearbox
A planetary motor and gearbox are a common combination of electric and mechanical power sources. They share the load of rotation between multiple gear teeth to increase the torque capacity. This design is also more rigid, with low backlash that can be as low as one or two arc minutes. The advantages of a planetary gearmotor over a conventional electric motor include compact size, high efficiency, and less risk of gear failure. Planetary gear motors are also more reliable and durable than conventional electric motors.
A planetary gearbox is designed for a single stage of reduction, or a multiple-stage unit can be built with several individual cartridges. Gear ratios may also be selected according to user preference, either to face mount the output stage or to use a 5mm hex shaft. For multi-stage planetary gearboxes, there are a variety of different options available. These include high-efficiency planetary gearboxes that achieve a 98% efficiency at single reduction. In addition, they are noiseless, and reduce heat loss.
A planetary gearbox may be used to increase torque in a robot or other automated system. There are different types of planetary gear sets available, including gearboxes with sliding or rolling sections. When choosing a planetary gearset, consider the environment and other factors such as backlash, torque, and ratio. There are many advantages to a planetary gearbox and the benefits and drawbacks associated with it.
Planetary gearboxes are similar to those in a solar system. They feature a central sun gear in the middle, two or more outer gears, and a ring gear at the output. The planetary gears rotate in a ring-like structure around a stationary sun gear. When the gears are engaged, they are connected by a carrier that is fixed to the machine’s shaft.
Planetary gear motor
Planetary gear motors reduce the rotational speed of an armature by one or more times. The reduction ratio depends on the structure of the planetary gear device. The planetary gear device has an output shaft and an armature shaft. A separating plate separates the two. The output shaft moves in a circular pattern to turn the pinion 3. When the pinion rotates to the engagement position, it is engaged with the ring gear 4. The ring gear then transmits the rotational torque to the armature shaft. The result is that the engine cranks up.
Planetary gear motors are cylindrical in shape and are available in various power levels. They are typically made of steel or brass and contain multiple gears that share the load. These motors can handle massive power transfers. The planetary gear drive, on the other hand, requires more components, such as a sun’s gear and multiple planetary gears. Consequently, it may not be suitable for all types of applications. Therefore, the planetary gear drive is generally used for more complex machines.
Brush dusts from the electric motor may enter the planetary gear device and cause it to malfunction. In addition, abrasion wear on the separating plate can affect the gear engagement of the planetary gear device. If this occurs, the gears will not engage properly and may make noise. In order to prevent such a situation from occurring, it is important to regularly inspect planetary gear motors and their abrasion-resistant separating plates.
Planetary gear motors come in many different power levels and sizes. These motors are usually cylindrical in shape and are made of steel, brass, plastic, or a combination of both materials. A planetary gear motor can be used in applications where space is an issue. This motor also allows for low gearings in small spaces. The planetary gearing allows for large amounts of power transfer. The output shaft size is dependent on the gear ratio and the motor speed.
editor by CX 2023-04-20
China Ratio 51 Planetary Gearbox for SSS 56104 Brushless water cooling motor with high quality
Product Number: BLDC Motor
Utilization: BOAT, Car, Electric Bicycle, Fan, Residence Equipment
Sort: Micro Motor
Development: Permanent Magnet
Commutation: Brushless
Defend Function: Entirely Enclosed
Pace(RPM): 45k
Continuous Existing(A): ninety five-320A
Effectiveness: IE two
Certification: ce
motor: sss56104
Dimension: 56mm*104mm
weight: 1571g
pole: 6P
Gear Ratio: 3/4/5/7/10
Packaging Details: 1. Outer packing: Regular export carton with needed shipping marks 2. Inner packing: Watertight packing with shock absorbing EPE and cardboard surrounded 3. As for each the consumers needs
Port: HangZhou ZheJiang HangZhou HangZhou
Ratio 5:1 Planetary Gearbox for SSS 56104 Brushless water cooling motor Packing List: 1*SSS 561041* planetary gearbox Ratio 5:1 Detaild Information
| Design | Motor Winding | KV | Max existing(A) | Max voltage(V) | Max power(W) | No-load present(A) | Max velocity | Shaft diameterφ(mm) |
| SSS56104 | 10Y | 360 | ninety five | 108 | 11000 | 1 | 45K | φ10 |
| 9Y | 420 | 104 | 98 | 11000 | 1.2 | 45K | φ10 | |
| 8Y | 450 | one hundred ten | ninety two | 11000 | one.5 | 45K | φ8 | |
| 7Y | five hundred | one hundred twenty | 85 | 11000 | 1.6 | 45K | φ8 | |
| 5Y | 790 | a hundred and eighty | fifty eight | 11000 | 2.eight | 45K | φ8 | |
| 5D | 1400 | 320 | 32 | 11000 | 3.8 | 45K | φ8 |
| Regular life span(h) | >20000 |
| Iubricant | Efficiency Iubrication |
| course of rotation | The enter and output to the identical |
| Defense stage | Lp65 |
| Set up | arbitrarily |
| Gearbox define dimension | forty sixty |
| Reduction ratio | 3, 4, 5, 7, ten, 9, 12, Galvanized steel set screw shaft collar MSC-06 for gearboxstepper motor sixteen, twenty, 28, 35, 40, fifty,sixty four, 70, 80, one hundred, a hundred twenty five, one hundred forty, one hundred seventy five,200, 250, 350, 400,500,seven hundred, DC brushless motor 6 tooth 500w-1000w 120 kind differential motor for rear axle package one thousand. |
| Enter pace | 3000- 8000rpm |
| Backiash: Stage 1 | <8 (arcmin) |
| Phase 2 | <15 (arcmin) |
| Stage 3 | <22 (arcmin) |
| Working temperature | -25°C to +90°C |
Packing & Delivery Packaging Detail:
1. Outer packing: Regular export carton with needed shipping and delivery marks 2. Inner packing: Water-proof packing with shock absorbing EPE and cardboard surrounded 3. As per the clients requirements
Shipping Element:
Our Service1. Free servicing inside of twelve months guarantee2. Expert investigation and development team3. Complex help for installation4. Rigorous quality management system5. Customize manufacturing
Our CompanyLunyee Industries Growth Co., Ltd. is a top company for factory automation (FA) goods, we target on electrical power transmission and movement manage solutions! Our primary generation are power transmission merchandise like AC and DC(brush/brushless) gear motor, stepper motor, large precision planetary gearbox (spur/helical equipment) for stepping motor and so on.-WE Concentrate ON Buyer Satisfaction!All CZPT individuals are focused in customer pleasure! We provide our consumer by higher high quality, reduced price, quickly shipping and rapid response on right after revenue provider!No matter the products are produced by CZPT or our sub-contractors, a guarantee for high quality is accessible from us! CZPT use the most current gear for producing and examination! 365 385 Motor blowerHeat gunsmall electrical drill motor Handmade do-it-yourself DC motors
What Is a Gear Motor?
A gear motor is an electric motor coupled with a gear train. It uses either DC or AC power to achieve its purpose. The primary benefit of a gear reducer is its ability to multiply torque while maintaining a compact size. The trade-off of this additional torque comes in the form of a reduced output shaft speed and overall efficiency. However, proper gear technology and ratios provide optimum output and speed profiles. This type of motor unlocks the full potential of OEM equipment.
Inertial load
Inertial load on a gear motor is the amount of force a rotating device produces due to its inverse square relationship with its inertia. The greater the inertia, the less torque can be produced by the gear motor. However, if the inertia is too high, it can cause problems with positioning, settling time, and controlling torque and velocity. Gear ratios should be selected for optimal power transfer.
The duration of acceleration and braking time of a gear motor depends on the type of driven load. An inertia load requires longer acceleration time whereas a friction load requires breakaway torque to start the load and maintain it at its desired speed. Too short a time period can cause excessive gear loading and may result in damaged gears. A safe approach is to disconnect the load when power is disconnected to prevent inertia from driving back through the output shaft.
Inertia is a fundamental concept in the design of motors and drive systems. The ratio of mass and inertia of a load to a motor determines how well the motor can control its speed during acceleration or deceleration. The mass moment of inertia, also called rotational inertia, is dependent on the mass, geometry, and center of mass of an object.
Applications
There are many applications of gear motors. They provide a powerful yet efficient means of speed and torque control. They can be either AC or DC, and the two most common motor types are the three-phase asynchronous and the permanent magnet synchronous servomotor. The type of motor used for a given application will determine its cost, reliability, and complexity. Gear motors are typically used in applications where high torque is required and space or power constraints are significant.
There are two types of gear motors. Depending on the ratio, each gear has an output shaft and an input shaft. Gear motors use hydraulic pressure to produce torque. The pressure builds on one side of the motor until it generates enough torque to power a rotating load. This type of motors is not recommended for applications where load reversals occur, as the holding torque will diminish with age and shaft vibration. However, it can be used for precision applications.
The market landscape shows the competitive environment of the gear motor industry. This report also highlights key items, income and value creation by region and country. The report also examines the competitive landscape by region, including the United States, China, India, the GCC, South Africa, Brazil, and the rest of the world. It is important to note that the report contains segment-specific information, so that readers can easily understand the market potential of the geared motors market.
Size
The safety factor, or SF, of a gear motor is an important consideration when selecting one for a particular application. It compensates for the stresses placed on the gearing and enables it to run at maximum efficiency. Manufacturers provide tables detailing typical applications, with multiplication factors for duty. A gear motor with a SF of three or more is suitable for difficult applications, while a gearmotor with a SF of one or two is suitable for relatively easy applications.
The global gear motor market is highly fragmented, with numerous small players catering to various end-use industries. The report identifies various industry trends and provides comprehensive information on the market. It outlines historical data and offers valuable insights on the industry. The report also employs several methodologies and approaches to analyze the market. In addition to providing historical data, it includes detailed information by market segment. In-depth analysis of market segments is provided to help identify which technologies will be most suitable for which applications.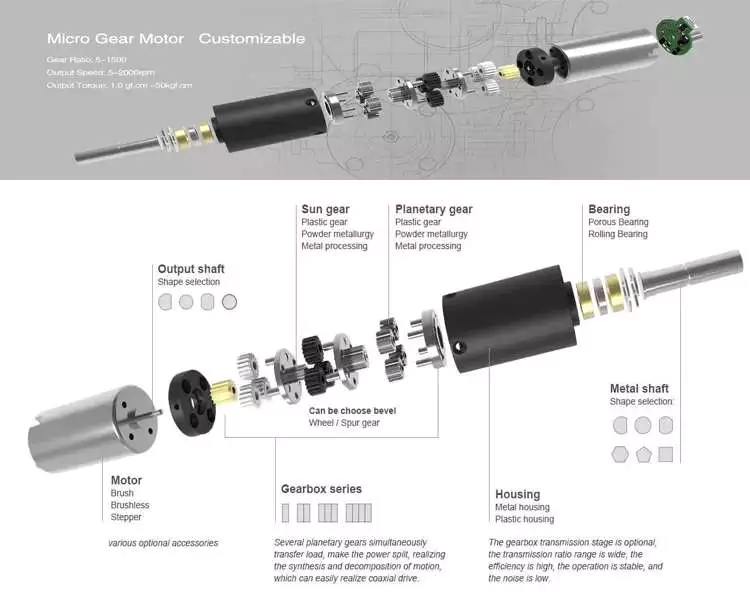
Cost
A gear motor is an electric motor that is paired with a gear train. They are available in AC or DC power systems. Compared to conventional motors, gear reducers can maximize torque while maintaining compact dimensions. But the trade-off is the reduced output shaft speed and overall efficiency. However, when used correctly, a gear motor can produce optimal output and mechanical fit. To understand how a gear motor works, let’s look at two types: right-angle geared motors and inline geared motors. The first two types are usually used in automation equipment and in agricultural and medical applications. The latter type is designed for rugged applications.
In addition to its efficiency, DC gear motors are space-saving and have low energy consumption. They can be used in a number of applications including money counters and printers. Automatic window machines and curtains, glass curtain walls, and banknote vending machines are some of the other major applications of these motors. They can cost up to 10 horsepower, which is a lot for an industrial machine. However, these are not all-out expensive.
Electric gear motors are versatile and widely used. However, they do not work well in applications requiring high shaft speed and torque. Examples of these include conveyor drives, frozen beverage machines, and medical tools. These applications require high shaft speed, so gear motors are not ideal for these applications. However, if noise and other problems are not a concern, a motor-only solution may be the better choice. This way, you can use a single motor for multiple applications.
Maintenance
Geared motors are among the most common equipment used for drive trains. Proper maintenance can prevent damage and maximize their efficiency. A guide to gear motor maintenance is available from WEG. To prevent further damage, follow these maintenance steps:
Regularly check electrical connections. Check for loose connections and torque them to the recommended values. Also, check the contacts and relays to make sure they are not tangled or damaged. Check the environment around the gear motor to prevent dust from clogging the passageway of electric current. A proper maintenance plan will help you identify problems and extend their life. The manual will also tell you about any problems with the gearmotor. However, this is not enough – it is important to check the condition of the gearbox and its parts.
Conduct visual inspection. The purpose of visual inspection is to note any irregularities that may indicate possible problems with the gear motor. A dirty motor may be an indication of a rough environment and a lot of problems. You can also perform a smell test. If you can smell a burned odor coming from the windings, there may be an overheating problem. Overheating can cause the windings to burn and damage.
Reactive maintenance is the most common method of motor maintenance. In this type of maintenance, you only perform repairs if the motor stops working due to a malfunction. Regular inspection is necessary to avoid unexpected motor failures. By using a logbook to document motor operations, you can determine when it is time to replace the gear motor. In contrast to preventive maintenance, reactive maintenance requires no regular tests or services. However, it is recommended to perform inspections every six months.
editor by czh 2023-02-20
China Original Track Drive Planetary Gearbox Motor for Rotary Drilling Rig Xr130e dc motor
Merchandise Description
Characteristics
Origin Equipment VC, VD Series Final Generate Motor(Monitor Motor) , As Developed-in large-reduced Switching Variable Pace Running Gear, Present Effective Output Torque, Outstanding Controllability and Large Dependability.
Host Manufacturer First Offer Channel Enjoy Official Warranty but Aggressive Expense in Origin Machinery.
Software for Construction & Foundation Gear like Excavator,Drill Rig and so on.
Specifics
Characteristic
one) a hundred% Host Machine Brand Supply Channel
2) Take pleasure in Formal Warranty Plan
three)Provide a Assortment of Features to Fulfill Buyer Needs
-Created-in automated shifting perform
-Built-in mechanical brake purpose
-Anti-shock perform when starting up and stopping
3) Reducer With Prolonged Support Existence
4) Assure Our Consumer Could Ideal Match Up
Technical specs
| Product | Journey System | Hydraulic Motor | Software excess weight | ||||||
| Equipment ratio(I) | Max. Output torque | Max. Output speed | Min. Displacement |
Max. Displacement |
Max. Pace | Rated force | Brake torque | ||
| – | N-m | rpm | cm3/rev | cmthree/rev | rpm | MPa | N-m | Ton | |
| TM07VC | 53.71 | 8,340 | sixty | 34 | 55.8 | 3,900 | 34.3 | a hundred | five~seven |
| DM09VD | forty five.97 | 10,790 | sixty | 34 | fifty five.8 | 3,900 | 34.three | a hundred and fifty | 7~eight |
| TM10VD | 54.forty seven | 12,250 | 70 | 34 | fifty five.eight | 3,900 | 34.three | one hundred ten | 8~ten |
| TM18VC | fifty three | 18,one hundred forty | 60 | 54 | 86 | three,200 | 34.three | 193 | twelve~14 |
| TM22VC | fifty three.71 | 23,340 | 60 | 54 | 86 | three,three hundred | 34.3 | 290 | fourteen~sixteen |
| TM30VD | 39.14 | 34,200 | fifty six | 110 | 158 | two,800 | 34.3 | 490 | 15~18 |
| TM40VD | forty nine.95 | 45,610 | sixty | 119 | one hundred seventy five | two,800 | 34.three | 490 | 20~26 |
| TM60VD | 46.twelve | sixty eight,640 | fifty two | 221 | 280 | 2,400 | 34.three | 870 | 30~34 |
| TM70VD | fifty four.forty seven | seventy eight,400 | 45 | 221 | 280 | two,four hundred | 34.3 | 870 | 36~42 |
Stock
In Origin Machinery warehouse, from TM07 to TM70 sequence ultimate generate motors, We have preserved an inventory price of much more than 5 million US dollars to guarantee a rapid source speed. We encounter the aftermarket of host equipment brand dealers and other spare elements that have wholesale requirements, 100% First equipment and the most aggressive charges, that is why you need to decide on us.You ought to have the best.
Apps
|
US $1,000-5,000 / Piece | |
2 Pieces (Min. Order) |
###
| After-sales Service: | Yes |
|---|---|
| Warranty: | 1 Year |
| Type: | Motor |
| Application: | Excavator |
| Certification: | CE, ISO9001: 2000 |
| Condition: | New |
###
| Customization: |
Available
|
|---|
###
| Model | Travel Device | Hydraulic Motor | Application weight | ||||||
| Gear ratio(I) | Max. Output torque | Max. Output speed | Min. Displacement |
Max. Displacement |
Max. Speed | Rated pressure | Brake torque | ||
| – | N-m | rpm | cm3/rev | cm3/rev | rpm | MPa | N-m | Ton | |
| TM07VC | 53.71 | 8,340 | 60 | 34 | 55.8 | 3,900 | 34.3 | 100 | 5~7 |
| DM09VD | 45.97 | 10,790 | 60 | 34 | 55.8 | 3,900 | 34.3 | 150 | 7~8 |
| TM10VD | 54.47 | 12,250 | 70 | 34 | 55.8 | 3,900 | 34.3 | 110 | 8~10 |
| TM18VC | 53 | 18,140 | 60 | 54 | 86 | 3,200 | 34.3 | 193 | 12~14 |
| TM22VC | 53.71 | 23,340 | 60 | 54 | 86 | 3,300 | 34.3 | 290 | 14~16 |
| TM30VD | 39.14 | 34,200 | 56 | 110 | 158 | 2,800 | 34.3 | 490 | 15~18 |
| TM40VD | 49.95 | 45,610 | 60 | 119 | 175 | 2,800 | 34.3 | 490 | 20~26 |
| TM60VD | 46.12 | 68,640 | 52 | 221 | 280 | 2,400 | 34.3 | 870 | 30~34 |
| TM70VD | 54.47 | 78,400 | 45 | 221 | 280 | 2,400 | 34.3 | 870 | 36~42 |
|
US $1,000-5,000 / Piece | |
2 Pieces (Min. Order) |
###
| After-sales Service: | Yes |
|---|---|
| Warranty: | 1 Year |
| Type: | Motor |
| Application: | Excavator |
| Certification: | CE, ISO9001: 2000 |
| Condition: | New |
###
| Customization: |
Available
|
|---|
###
| Model | Travel Device | Hydraulic Motor | Application weight | ||||||
| Gear ratio(I) | Max. Output torque | Max. Output speed | Min. Displacement |
Max. Displacement |
Max. Speed | Rated pressure | Brake torque | ||
| – | N-m | rpm | cm3/rev | cm3/rev | rpm | MPa | N-m | Ton | |
| TM07VC | 53.71 | 8,340 | 60 | 34 | 55.8 | 3,900 | 34.3 | 100 | 5~7 |
| DM09VD | 45.97 | 10,790 | 60 | 34 | 55.8 | 3,900 | 34.3 | 150 | 7~8 |
| TM10VD | 54.47 | 12,250 | 70 | 34 | 55.8 | 3,900 | 34.3 | 110 | 8~10 |
| TM18VC | 53 | 18,140 | 60 | 54 | 86 | 3,200 | 34.3 | 193 | 12~14 |
| TM22VC | 53.71 | 23,340 | 60 | 54 | 86 | 3,300 | 34.3 | 290 | 14~16 |
| TM30VD | 39.14 | 34,200 | 56 | 110 | 158 | 2,800 | 34.3 | 490 | 15~18 |
| TM40VD | 49.95 | 45,610 | 60 | 119 | 175 | 2,800 | 34.3 | 490 | 20~26 |
| TM60VD | 46.12 | 68,640 | 52 | 221 | 280 | 2,400 | 34.3 | 870 | 30~34 |
| TM70VD | 54.47 | 78,400 | 45 | 221 | 280 | 2,400 | 34.3 | 870 | 36~42 |
Dynamic Modeling of a Planetary Motor
A planetary gear motor consists of a series of gears rotating in perfect synchrony, allowing them to deliver torque in a higher output capacity than a spur gear motor. Unlike the planetary motor, spur gear motors are simpler to build and cost less, but they are better for applications requiring lower torque output. That is because each gear carries the entire load. The following are some key differences between the two types of gearmotors.
planetary gear system
A planetary gear transmission is a type of gear mechanism that transfers torque from one source to another, usually a rotary motion. Moreover, this type of gear transmission requires dynamic modeling to investigate its durability and reliability. Previous studies included both uncoupled and coupled meshing models for the analysis of planetary gear transmission. The combined model considers both the shaft structural stiffness and the bearing support stiffness. In some applications, the flexible planetary gear may affect the dynamic response of the system.
In a planetary gear device, the axial end surface of the cylindrical portion is rotatable relative to the separating plate. This mechanism retains lubricant. It is also capable of preventing foreign particles from entering the planetary gear system. A planetary gear device is a great choice if your planetary motor’s speed is high. A high-quality planetary gear system can provide a superior performance than conventional systems.
A planetary gear system is a complex mechanism, involving three moving links that are connected to each other through joints. The sun gear acts as an input and the planet gears act as outputs. They rotate about their axes at a ratio determined by the number of teeth on each gear. The sun gear has 24 teeth, while the planet gears have three-quarters that ratio. This ratio makes a planetary motor extremely efficient.
planetary gear train
To predict the free vibration response of a planetary motor gear train, it is essential to develop a mathematical model for the system. Previously, static and dynamic models were used to study the behavior of planetary motor gear trains. In this study, a dynamic model was developed to investigate the effects of key design parameters on the vibratory response. Key parameters for planetary gear transmissions include the structure stiffness and mesh stiffness, and the mass and location of the shaft and bearing supports.
The design of the planetary motor gear train consists of several stages that can run with variable input speeds. The design of the gear train enables the transmission of high torques by dividing the load across multiple planetary gears. In addition, the planetary gear train has multiple teeth which mesh simultaneously in operation. This design also allows for higher efficiency and transmittable torque. Here are some other advantages of planetary motor gear trains. All these advantages make planetary motor gear trains one of the most popular types of planetary motors.
The compact footprint of planetary gears allows for excellent heat dissipation. High speeds and sustained performances will require lubrication. This lubricant can also reduce noise and vibration. But if these characteristics are not desirable for your application, you can choose a different gear type. Alternatively, if you want to maintain high performance, a planetary motor gear train will be the best choice. So, what are the advantages of planetary motor gears?
planetary gear train with fixed carrier train ratio
The planetary gear train is a common type of transmission in various machines. Its main advantages are high efficiency, compactness, large transmission ratio, and power-to-weight ratio. This type of gear train is a combination of spur gears, single-helical gears, and herringbone gears. Herringbone planetary gears have lower axial force and high load carrying capacity. Herringbone planetary gears are commonly used in heavy machinery and transmissions of large vehicles.
To use a planetary gear train with a fixed carrier train ratio, the first and second planets must be in a carrier position. The first planet is rotated so that its teeth mesh with the sun’s. The second planet, however, cannot rotate. It must be in a carrier position so that it can mesh with the sun. This requires a high degree of precision, so the planetary gear train is usually made of multiple sets. A little analysis will simplify this design.
The planetary gear train is made up of three components. The outer ring gear is supported by a ring gear. Each gear is positioned at a specific angle relative to one another. This allows the gears to rotate at a fixed rate while transferring the motion. This design is also popular in bicycles and other small vehicles. If the planetary gear train has several stages, multiple ring gears may be shared. A stationary ring gear is also used in pencil sharpener mechanisms. Planet gears are extended into cylindrical cutters. The ring gear is stationary and the planet gears rotate around a sun axis. In the case of this design, the outer ring gear will have a -3/2 planet gear ratio.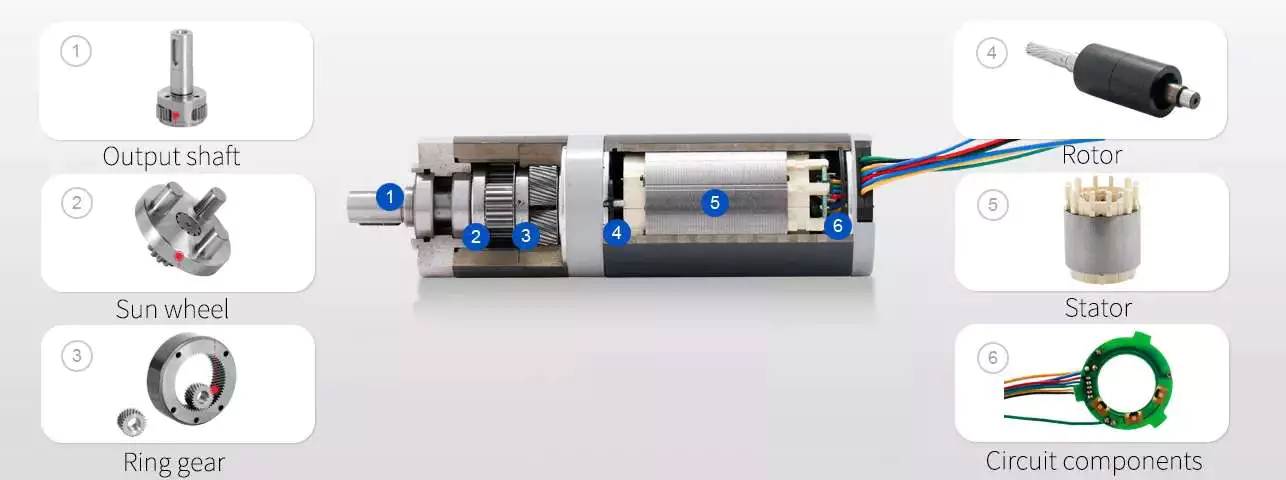
planetary gear train with zero helix angle
The torque distribution in a planetary gear is skewed, and this will drastically reduce the load carrying capacity of a needle bearing, and therefore the life of the bearing. To better understand how this can affect a gear train, we will examine two studies conducted on the load distribution of a planetary gear with a zero helix angle. The first study was done with a highly specialized program from the bearing manufacturer INA/FAG. The red line represents the load distribution along a needle roller in a zero helix gear, while the green line corresponds to the same distribution of loads in a 15 degree helix angle gear.
Another method for determining a gear’s helix angle is to consider the ratio of the sun and planet gears. While the sun gear is normally on the input side, the planet gears are on the output side. The sun gear is stationary. The two gears are in engagement with a ring gear that rotates 45 degrees clockwise. Both gears are attached to pins that support the planet gears. In the figure below, you can see the tangential and axial gear mesh forces on a planetary gear train.
Another method used for calculating power loss in a planetary gear train is the use of an auto transmission. This type of gear provides balanced performance in both power efficiency and load capacity. Despite the complexities, this method provides a more accurate analysis of how the helix angle affects power loss in a planetary gear train. If you’re interested in reducing the power loss of a planetary gear train, read on!
planetary gear train with spur gears
A planetary gearset is a type of mechanical drive system that uses spur gears that move in opposite directions within a plane. Spur gears are one of the more basic types of gears, as they don’t require any specialty cuts or angles to work. Instead, spur gears use a complex tooth shape to determine where the teeth will make contact. This in turn, will determine the amount of power, torque, and speed they can produce.
A two-stage planetary gear train with spur gears is also possible to run at variable input speeds. For such a setup, a mathematical model of the gear train is developed. Simulation of the dynamic behaviour highlights the non-stationary effects, and the results are in good agreement with the experimental data. As the ratio of spur gears to spur gears is not constant, it is called a dedendum.
A planetary gear train with spur gears is a type of epicyclic gear train. In this case, spur gears run between gears that contain both internal and external teeth. The circumferential motion of the spur gears is analogous to the rotation of planets in the solar system. There are four main components of a planetary gear train. The planet gear is positioned inside the sun gear and rotates to transfer motion to the sun gear. The planet gears are mounted on a joint carrier that is connected to the output shaft.
planetary gear train with helical gears
A planetary gear train with helical teeth is an extremely powerful transmission system that can provide high levels of power density. Helical gears are used to increase efficiency by providing a more efficient alternative to conventional worm gears. This type of transmission has the potential to improve the overall performance of a system, and its benefits extend far beyond the power density. But what makes this transmission system so appealing? What are the key factors to consider when designing this type of transmission system?
The most basic planetary train consists of the sun gear, planet gear, and ring gear elements. The number of planets varies, but the basic structure of planetary gears is similar. A simple planetary geartrain has the sun gear driving a carrier assembly. The number of planets can be as low as two or as high as six. A planetary gear train has a low mass inertia and is compact and reliable.
The mesh phase properties of a planetary gear train are particularly important in designing the profiles. Various parameters such as mesh phase difference and tooth profile modifications must be studied in depth in order to fully understand the dynamic characteristics of a PGT. These factors, together with others, determine the helical gears’ performance. It is therefore essential to understand the mesh phase of a planetary gear train to design it effectively.
editor by czh 2023-01-13
China 86mm Width BLDC Motor with Planetary / Worm Gearbox / Brake / Encoder / Controller Brushless DC Gear Geared Motor Used for Sliding Door with Customized Service car motor
Merchandise Description
86mm Width BLDC Motor with Planetary / Worm Gearbox / Brake / Encoder / Controller Brushless Dc Gear Geared Motor Utilized for Sliding Door with Custom-made Support
Item Description
Solution Title: Brushless DC Motor
Amount of Stage: 3 Phase
Amount of Poles: 4 Poles /8 Poles /ten Poles
Rated Voltage: 12v /24v /36v /48v /310v
Rated Speed: 3000rpm /4000rpm /or personalized
Rated Torque: Personalized
Rated Present: Custom-made
Rated Electricity: 23w~2500W
Jkongmotor has a broad range of micro motor manufacturing traces in the sector, including Stepper Motor, DC Servo Motor, AC Motor, Brushless Motor, Planetary Equipment Motor, Planetary Gearbox and many others. Through technological innovation and customization, we assist you generate outstanding application methods and provide adaptable remedies for a variety of industrial automation situations.
86mm 48V Dc Brushless Motor Parameters:
| Specification | Unit | Model | ||||
| JK86BLS58 | JK86BLS71 | JK86BLS84 | JK86BLS98 | JK86BLS125 | ||
| Number Of Period | Stage | 3 | ||||
| Variety Of Poles | Poles | 8 | ||||
| Rated Voltage | VDC | 48 | ||||
| Rated Velocity | Rpm | 3000 | ||||
| Rated Torque | N.m | .35 | .7 | one.05 | 1.four | 2.one |
| Rated Existing | Amps | three | six.three | nine | 11.five | 18 |
| Rated Energy | W | one hundred ten | 220 | 330 | 440 | 660 |
| Peak Torque | N.m | 1.05 | 2.1 | three.15 | four.2 | 6.3 |
| Peak Present | Amps | nine | 19 | 27 | 35 | 54 |
| Back E.M.F | V/Krpm | thirteen.7 | thirteen | 13.5 | 13.7 | thirteen.five |
| Torque Constant | N.m/A | .13 | .12 | .thirteen | .13 | .13 |
| Rotor Inertia | g.cm2 | four hundred | 800 | 1200 | 1600 | 2400 |
| Human body Size | mm | 71 | 84.five | ninety eight | 111.five | 138.5 |
| Excess weight | Kg | one.5 | 1.9 | two.3 | 2.7 | 4 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Diploma of Defense | IP30 | |||||
| Storage Temperature | -twenty five~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Functioning Humidity | 85% RH or under (no condensation) | |||||
| Operating Atmosphere | Outdoor (no direct sunlight), no corrosive gasoline, no flammable fuel, no oil mist, no dust | |||||
| Altitude | 1000 meters or considerably less | |||||
86mm Gearbox Parameters:
| Gearbox Electrical Specification: | ||||||
| Phase | One phase | Two phase | Three stage | |||
| Ratio | 3,4,5,8,ten | 12,fifteen,16,twenty,twenty five,32,forty,sixty four,a hundred | 64,80,100,120,125,a hundred and sixty,200,256,320,512,one thousand | |||
| Length (mm) | L2 | L3 | L2 | L3 | L2 | L3 |
| 153 | sixty five | 177 | 89 | 201 | 113 | |
| Max.Input Rpm (Rpm) | 6000 | 6000 | 6000 | |||
| Max.Radial load (N) | 550 | 550 | 550 | |||
| Max.Shaft axial load (N) | 500 | 500 | 500 | |||
| Effectiveness (%) | 96 | 94 | 90 | |||
| Backlash arcmin (arcmin) | ≤8 | ≤10 | ≤12 | |||
| Noise (dB) | ≤60 | ≤60 | ≤60 | |||
| Excess weight (Kg) | 3.2 | 3.nine | 4.8 | |||
| Typical usefui life (h) | >10000 | |||||
| Lubricating method | Long-phrase | |||||
| Rotation route | Input/Output syntropy | |||||
| Defense degree | IP65 | |||||
86mm Planetary Gearbox Parameters:
| Suitable brushless dc motor shaft | |||
| Motor Shaft Pinion Specs | |||
| Module | 1 | ||
| No. of tooth | twelve | 13 | 22 |
| Stress angle | 20° | ||
| Hole diameter | 10 tooth pinion | Φ7H7 | Φ8H7 |
| Reduction ratio | 1/6.6 1/23 1/26 1/37 1/92 1/138 | one/5.31 1/19 1/30 1/74 1/111 | one/3.55 1/13 1/fifty |
| Gearbox Specs: | ||||||
| Reduction ratio | Exact reduction ratio | Rated tolerance torque | Max momentary tolerance torque | Performance | L (mm) | Excess weight (g) |
| one/3.55 1/5.31 1/6.six | 1/3.55 1/5.31 1/6.6 | eight N.m Max | 12 N.m | .9 | 55.7±0.5 | 1100 |
| one/13 1/19 1/23 | 1/twelve.57 1/eighteen.82 1/23.four | thirty N.m Max | 45 N.m | 81% | seventy two.2±0.5 | 1500 |
| 1/26 1/30 1/37 | 1/26.05 1/30.08 1/37.4 | 60 N.m Max | 90 N.m | .73 | 72.2±0.five | 1500 |
| one/50 1/74 1/92 1/111 1/138 | 1/49.62 1/74.28 1/92.37 1/111.2 1/138.28 | 80 N.m Max | 120 N.m | 66% | 88.5±0.5 | 1880 |
| Input & output same rotation direction Motor Max. enter velocity: <4000rpm Operating temperature range: -15ºC ~ +80ºC | ||||||
Other Brushless Dc Motor
42mm 24V Brushless DC Motor Parameters:
| Specification | Unit | Model | |||
| JK42BLS01 | JK42BLS02 | JK42BLS03 | JK42BLS04 | ||
| Variety Of Period | Stage | 3 | |||
| Quantity Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 24 | |||
| Rated Speed | Rpm | 4000 | |||
| Rated Torque | N.m | .0625 | .125 | .185 | .25 |
| Peak Existing | Amps | 1.8 | 3.3 | 4.8 | six.three |
| Rated Electricity | W | 26 | 52.5 | seventy seven.5 | a hundred and five |
| Peak Torque | N.m | .19 | .38 | .56 | .seventy five |
| Peak Recent | Amps | 5.4 | 10.six | fifteen.five | 20 |
| Back E.M.F | V/Krpm | four.1 | four.2 | 4.three | 4.three |
| Torque Continual | N.m/A | .039 | .04 | .041 | .041 |
| Rotor Inertia | g.cm2 | 24 | 48 | seventy two | ninety six |
| Physique Duration | mm | ||||
| Excess weight | Kg | ||||
| Sensor | Honeywell | ||||
| Insulation Course | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -twenty five~+70ºC | ||||
| Working Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or under (no condensation) | ||||
| Operating Environment | Outdoor (no immediate sunlight), no corrosive gas, no flammable fuel, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
57mm 36V Brushless DC Motor Parameters:
| Specification | Unit | Model | ||||
| JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 | ||
| Variety Of Section | Section | 3 | ||||
| Number Of Poles | Poles | 4 | ||||
| Rated Voltage | VDC | 36 | ||||
| Rated Pace | Rpm | 4000 | ||||
| Rated Torque | N.m | .055 | .eleven | .22 | .33 | .forty four |
| Rated Existing | Amps | 1.two | two | 3.6 | five.3 | six.eight |
| Rated Energy | W | 23 | forty six | 92 | 138 | 184 |
| Peak Torque | N.m | .16 | .33 | .66 | one | one.32 |
| Peak Present | Amps | three.five | six.eight | 11.5 | 15.5 | twenty.5 |
| Back E.M.F | V/Krpm | 7.eight | seven.7 | seven.four | 7.3 | seven.one |
| Torque Consistent | N.m/A | .074 | .073 | .07 | .07 | .068 |
| Rotor Inertia | g.cm2 | 30 | seventy five | 119 | 173 | 230 |
| Entire body Size | mm | 37 | forty seven | 67 | 87 | 107 |
| Weight | Kg | .33 | .44 | .75 | one | one.25 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Diploma of Security | IP30 | |||||
| Storage Temperature | -twenty five~+70ºC | |||||
| Running Temperature | -fifteen~+50ºC | |||||
| Working Humidity | 85% RH or underneath (no condensation) | |||||
| Working Setting | Outdoor (no direct sunlight), no corrosive gasoline, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or considerably less | |||||
60mm 48V Brushless DC Motor Parameters:
| Specification | Unit | Model | |||
| JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 | ||
| Number Of Period | Stage | 3 | |||
| Variety Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Pace | Rpm | 3000 | |||
| Rated Torque | N.m | .three | .six | .nine | one.two |
| Rated Existing | Amps | 2.eight | 5.two | 7.5 | 9.five |
| Rated Energy | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | .nine | 1.eight | two.seven | three.6 |
| Peak Current | Amps | 8.four | fifteen.six | 22.five | 28.5 |
| Back again E.M.F | V/Krpm | twelve.1 | twelve.6 | twelve.4 | 13.3 |
| Torque Constant | N.m/A | .116 | .twelve | .118 | .127 |
| Rotor Inertia | kg.cm2 | .24 | .forty eight | .72 | .96 |
| Entire body Length | mm | seventy eight | ninety nine | 120 | 141 |
| Excess weight | Kg | .eighty five | 1.twenty five | one.sixty five | two.05 |
| Sensor | Honeywell | ||||
| Insulation Course | B | ||||
| Diploma of Defense | IP30 | ||||
| Storage Temperature | -twenty five~+70ºC | ||||
| Running Temperature | -15~+50ºC | ||||
| Operating Humidity | 85% RH or under (no condensation) | ||||
| Operating Atmosphere | Outdoor (no direct sunlight), no corrosive gas, no flammable fuel, no oil mist, no dust | ||||
| Altitude | 1000 meters or much less | ||||
80mm 48V BLDC Motor Parameters:
| Specification | Unit | Model | |||
| JK80BLS01 | JK80BLS02 | JK80BLS03 | JK80BLS04 | ||
| Number Of Section | Stage | 3 | |||
| Variety Of Poles | Poles | 4 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | .35 | .7 | one.05 | 1.four |
| Rated Current | Amps | 3 | five.5 | eight | 10.five |
| Rated Energy | W | 110 | 220 | 330 | 440 |
| Peak Torque | N.m | 1.05 | two.one | three.fifteen | 4.two |
| Peak Current | Amps | nine | sixteen.five | 24 | 31.5 |
| Again E.M.F | V/Krpm | 13.five | 13.three | 13.1 | thirteen |
| Torque Continuous | N.m/A | .thirteen | .127 | .126 | .124 |
| Rotor Inertia | g.cm2 | 210 | 420 | 630 | 840 |
| Body Duration | mm | seventy eight | ninety eight | 118 | 138 |
| Bodyweight | Kg | 1.4 | two | 2.6 | 3.two |
| Sensor | Honeywell | ||||
| Insulation Course | B | ||||
| Degree of Defense | IP30 | ||||
| Storage Temperature | -twenty five~+70ºC | ||||
| Running Temperature | -fifteen~+50ºC | ||||
| Functioning Humidity | 85% RH or beneath (no condensation) | ||||
| Operating Setting | Outdoor (no immediate sunlight), no corrosive gasoline, no flammable fuel, no oil mist, no dust | ||||
| Altitude | 1000 meters or much less | ||||
110mm 310V Brushless Motor Parameters:
| Specification | Unit | Model | |||
| JK110BLS050 | JK110BLS75 | JK110BLS100 | JK110BLS125 | ||
| Variety Of Section | Period | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 310 | |||
| Rated Velocity | Rpm | 3400 | |||
| Rated Torque | N.m | two.38 | three.3 | five | 6.6 |
| Rated Present | Amps | .five | .6 | .8 | 1 |
| Rated Electricity | KW | .75 | one.03 | 1.57 | two.07 |
| Back again E.M.F | V/Krpm | ninety one.1 | 91.one | 91.one | 88.6 |
| Torque Continual | N.m/A | .87 | .87 | .87 | .845 |
| Entire body Length | mm | 130 | a hundred and fifty five | a hundred and eighty | 205 |
| Sensor | Honeywell | ||||
| Insulation Course | H | ||||
Stepping Motor Customized
Planetary Gearbox Kind:
Thorough Pictures
Cnc Motor Kits Brushless dc Motor with Brake
Brushless Dc Motor with Planetary Gearbox Bldc Motor with Encoder
Brushless Dc Motor Brushed Dc Motor Hybrid Stepper Motor
Organization Profile
HangZhou CZPT Co., Ltd was a substantial technologies sector zone in HangZhou, china. Our products utilised in many types of machines, these kinds of as 3d printer CNC machine, health care gear, weaving printing equipments and so on.
JKONGMOTOR warmly welcome ‘OEM’ & ‘ODM’ cooperations and other firms to establish prolonged-term cooperation with us.
Company spirit of sincere and excellent track record, received the recognition and support of the broad masses of clients, at the same time with the domestic and overseas suppliers close group of interests, the organization entered the stage of stage of benign development, laying a sound basis for the strategic purpose of recognizing only really the sustainable growth of the company.
Equipments Display:
Manufacturing Circulation:
Package deal:
Certification:
|
US $10-50 / Piece | |
10 Pieces (Min. Order) |
###
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated |
|---|
###
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
###
| Samples: |
US$ 20/Piece
1 Piece(Min.Order) need to confirm the cost with seller
|
|---|
###
| Customization: |
Available
|
|---|
###
| Specification | Unit | Model | ||||
| JK86BLS58 | JK86BLS71 | JK86BLS84 | JK86BLS98 | JK86BLS125 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 8 | ||||
| Rated Voltage | VDC | 48 | ||||
| Rated Speed | Rpm | 3000 | ||||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 | 2.1 |
| Rated Current | Amps | 3 | 6.3 | 9 | 11.5 | 18 |
| Rated Power | W | 110 | 220 | 330 | 440 | 660 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 | 6.3 |
| Peak Current | Amps | 9 | 19 | 27 | 35 | 54 |
| Back E.M.F | V/Krpm | 13.7 | 13 | 13.5 | 13.7 | 13.5 |
| Torque Constant | N.m/A | 0.13 | 0.12 | 0.13 | 0.13 | 0.13 |
| Rotor Inertia | g.cm2 | 400 | 800 | 1200 | 1600 | 2400 |
| Body Length | mm | 71 | 84.5 | 98 | 111.5 | 138.5 |
| Weight | Kg | 1.5 | 1.9 | 2.3 | 2.7 | 4 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| Gearbox Electrical Specification: | ||||||
| Stage | One stage | Two stage | Three stage | |||
| Ratio | 3,4,5,8,10 | 12,15,16,20,25,32,40,64,100 | 64,80,100,120,125,160,200,256,320,512,1000 | |||
| Length (mm) | L2 | L3 | L2 | L3 | L2 | L3 |
| 153 | 65 | 177 | 89 | 201 | 113 | |
| Max.Input Rpm (Rpm) | 6000 | 6000 | 6000 | |||
| Max.Radial load (N) | 550 | 550 | 550 | |||
| Max.Shaft axial load (N) | 500 | 500 | 500 | |||
| Efficiency (%) | 96 | 94 | 90 | |||
| Backlash arcmin (arcmin) | ≤8 | ≤10 | ≤12 | |||
| Noise (dB) | ≤60 | ≤60 | ≤60 | |||
| Weight (Kg) | 3.2 | 3.9 | 4.8 | |||
| Average usefui life (h) | >10000 | |||||
| Lubricating system | Long-term | |||||
| Rotation direction | Input/Output syntropy | |||||
| Protection level | IP65 | |||||
###
| Suitable brushless dc motor shaft | |||
| Motor Shaft Pinion Specifications | |||
| Module | 1 | ||
| No. of teeth | 12 | 13 | 22 |
| Pressure angle | 20° | ||
| Hole diameter | 10 teeth pinion | Φ7H7 | Φ8H7 |
| Reduction ratio | 1/6.6 1/23 1/26 1/37 1/92 1/138 | 1/5.31 1/19 1/30 1/74 1/111 | 1/3.55 1/13 1/50 |
###
| Gearbox Specifications: | ||||||
| Reduction ratio | Exact reduction ratio | Rated tolerance torque | Max momentary tolerance torque | Efficiency | L (mm) | Weight (g) |
| 1/3.55 1/5.31 1/6.6 | 1/3.55 1/5.31 1/6.6 | 8 N.m Max | 12 N.m | 0.9 | 55.7±0.5 | 1100 |
| 1/13 1/19 1/23 | 1/12.57 1/18.82 1/23.4 | 30 N.m Max | 45 N.m | 81% | 72.2±0.5 | 1500 |
| 1/26 1/30 1/37 | 1/26.05 1/30.08 1/37.4 | 60 N.m Max | 90 N.m | 0.73 | 72.2±0.5 | 1500 |
| 1/50 1/74 1/92 1/111 1/138 | 1/49.62 1/74.28 1/92.37 1/111.2 1/138.28 | 80 N.m Max | 120 N.m | 66% | 88.5±0.5 | 1880 |
| Input & output same rotation direction; Motor Max. input speed: <4000rpm; Operating temperature range: -15ºC ~ +80ºC | ||||||
###
| Specification | Unit | Model | |||
| JK42BLS01 | JK42BLS02 | JK42BLS03 | JK42BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 24 | |||
| Rated Speed | Rpm | 4000 | |||
| Rated Torque | N.m | 0.0625 | 0.125 | 0.185 | 0.25 |
| Peak Current | Amps | 1.8 | 3.3 | 4.8 | 6.3 |
| Rated Power | W | 26 | 52.5 | 77.5 | 105 |
| Peak Torque | N.m | 0.19 | 0.38 | 0.56 | 0.75 |
| Peak Current | Amps | 5.4 | 10.6 | 15.5 | 20 |
| Back E.M.F | V/Krpm | 4.1 | 4.2 | 4.3 | 4.3 |
| Torque Constant | N.m/A | 0.039 | 0.04 | 0.041 | 0.041 |
| Rotor Inertia | g.cm2 | 24 | 48 | 72 | 96 |
| Body Length | mm | ||||
| Weight | Kg | ||||
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | ||||
| JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 4 | ||||
| Rated Voltage | VDC | 36 | ||||
| Rated Speed | Rpm | 4000 | ||||
| Rated Torque | N.m | 0.055 | 0.11 | 0.22 | 0.33 | 0.44 |
| Rated Current | Amps | 1.2 | 2 | 3.6 | 5.3 | 6.8 |
| Rated Power | W | 23 | 46 | 92 | 138 | 184 |
| Peak Torque | N.m | 0.16 | 0.33 | 0.66 | 1 | 1.32 |
| Peak Current | Amps | 3.5 | 6.8 | 11.5 | 15.5 | 20.5 |
| Back E.M.F | V/Krpm | 7.8 | 7.7 | 7.4 | 7.3 | 7.1 |
| Torque Constant | N.m/A | 0.074 | 0.073 | 0.07 | 0.07 | 0.068 |
| Rotor Inertia | g.cm2 | 30 | 75 | 119 | 173 | 230 |
| Body Length | mm | 37 | 47 | 67 | 87 | 107 |
| Weight | Kg | 0.33 | 0.44 | 0.75 | 1 | 1.25 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| Specification | Unit | Model | |||
| JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.3 | 0.6 | 0.9 | 1.2 |
| Rated Current | Amps | 2.8 | 5.2 | 7.5 | 9.5 |
| Rated Power | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | 0.9 | 1.8 | 2.7 | 3.6 |
| Peak Current | Amps | 8.4 | 15.6 | 22.5 | 28.5 |
| Back E.M.F | V/Krpm | 12.1 | 12.6 | 12.4 | 13.3 |
| Torque Constant | N.m/A | 0.116 | 0.12 | 0.118 | 0.127 |
| Rotor Inertia | kg.cm2 | 0.24 | 0.48 | 0.72 | 0.96 |
| Body Length | mm | 78 | 99 | 120 | 141 |
| Weight | Kg | 0.85 | 1.25 | 1.65 | 2.05 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK80BLS01 | JK80BLS02 | JK80BLS03 | JK80BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 4 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 |
| Rated Current | Amps | 3 | 5.5 | 8 | 10.5 |
| Rated Power | W | 110 | 220 | 330 | 440 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 |
| Peak Current | Amps | 9 | 16.5 | 24 | 31.5 |
| Back E.M.F | V/Krpm | 13.5 | 13.3 | 13.1 | 13 |
| Torque Constant | N.m/A | 0.13 | 0.127 | 0.126 | 0.124 |
| Rotor Inertia | g.cm2 | 210 | 420 | 630 | 840 |
| Body Length | mm | 78 | 98 | 118 | 138 |
| Weight | Kg | 1.4 | 2 | 2.6 | 3.2 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK110BLS050 | JK110BLS75 | JK110BLS100 | JK110BLS125 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 310 | |||
| Rated Speed | Rpm | 3400 | |||
| Rated Torque | N.m | 2.38 | 3.3 | 5 | 6.6 |
| Rated Current | Amps | 0.5 | 0.6 | 0.8 | 1 |
| Rated Power | KW | 0.75 | 1.03 | 1.57 | 2.07 |
| Back E.M.F | V/Krpm | 91.1 | 91.1 | 91.1 | 88.6 |
| Torque Constant | N.m/A | 0.87 | 0.87 | 0.87 | 0.845 |
| Body Length | mm | 130 | 155 | 180 | 205 |
| Sensor | Honeywell | ||||
| Insulation Class | H | ||||
|
US $10-50 / Piece | |
10 Pieces (Min. Order) |
###
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated |
|---|
###
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
###
| Samples: |
US$ 20/Piece
1 Piece(Min.Order) need to confirm the cost with seller
|
|---|
###
| Customization: |
Available
|
|---|
###
| Specification | Unit | Model | ||||
| JK86BLS58 | JK86BLS71 | JK86BLS84 | JK86BLS98 | JK86BLS125 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 8 | ||||
| Rated Voltage | VDC | 48 | ||||
| Rated Speed | Rpm | 3000 | ||||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 | 2.1 |
| Rated Current | Amps | 3 | 6.3 | 9 | 11.5 | 18 |
| Rated Power | W | 110 | 220 | 330 | 440 | 660 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 | 6.3 |
| Peak Current | Amps | 9 | 19 | 27 | 35 | 54 |
| Back E.M.F | V/Krpm | 13.7 | 13 | 13.5 | 13.7 | 13.5 |
| Torque Constant | N.m/A | 0.13 | 0.12 | 0.13 | 0.13 | 0.13 |
| Rotor Inertia | g.cm2 | 400 | 800 | 1200 | 1600 | 2400 |
| Body Length | mm | 71 | 84.5 | 98 | 111.5 | 138.5 |
| Weight | Kg | 1.5 | 1.9 | 2.3 | 2.7 | 4 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| Gearbox Electrical Specification: | ||||||
| Stage | One stage | Two stage | Three stage | |||
| Ratio | 3,4,5,8,10 | 12,15,16,20,25,32,40,64,100 | 64,80,100,120,125,160,200,256,320,512,1000 | |||
| Length (mm) | L2 | L3 | L2 | L3 | L2 | L3 |
| 153 | 65 | 177 | 89 | 201 | 113 | |
| Max.Input Rpm (Rpm) | 6000 | 6000 | 6000 | |||
| Max.Radial load (N) | 550 | 550 | 550 | |||
| Max.Shaft axial load (N) | 500 | 500 | 500 | |||
| Efficiency (%) | 96 | 94 | 90 | |||
| Backlash arcmin (arcmin) | ≤8 | ≤10 | ≤12 | |||
| Noise (dB) | ≤60 | ≤60 | ≤60 | |||
| Weight (Kg) | 3.2 | 3.9 | 4.8 | |||
| Average usefui life (h) | >10000 | |||||
| Lubricating system | Long-term | |||||
| Rotation direction | Input/Output syntropy | |||||
| Protection level | IP65 | |||||
###
| Suitable brushless dc motor shaft | |||
| Motor Shaft Pinion Specifications | |||
| Module | 1 | ||
| No. of teeth | 12 | 13 | 22 |
| Pressure angle | 20° | ||
| Hole diameter | 10 teeth pinion | Φ7H7 | Φ8H7 |
| Reduction ratio | 1/6.6 1/23 1/26 1/37 1/92 1/138 | 1/5.31 1/19 1/30 1/74 1/111 | 1/3.55 1/13 1/50 |
###
| Gearbox Specifications: | ||||||
| Reduction ratio | Exact reduction ratio | Rated tolerance torque | Max momentary tolerance torque | Efficiency | L (mm) | Weight (g) |
| 1/3.55 1/5.31 1/6.6 | 1/3.55 1/5.31 1/6.6 | 8 N.m Max | 12 N.m | 0.9 | 55.7±0.5 | 1100 |
| 1/13 1/19 1/23 | 1/12.57 1/18.82 1/23.4 | 30 N.m Max | 45 N.m | 81% | 72.2±0.5 | 1500 |
| 1/26 1/30 1/37 | 1/26.05 1/30.08 1/37.4 | 60 N.m Max | 90 N.m | 0.73 | 72.2±0.5 | 1500 |
| 1/50 1/74 1/92 1/111 1/138 | 1/49.62 1/74.28 1/92.37 1/111.2 1/138.28 | 80 N.m Max | 120 N.m | 66% | 88.5±0.5 | 1880 |
| Input & output same rotation direction; Motor Max. input speed: <4000rpm; Operating temperature range: -15ºC ~ +80ºC | ||||||
###
| Specification | Unit | Model | |||
| JK42BLS01 | JK42BLS02 | JK42BLS03 | JK42BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 24 | |||
| Rated Speed | Rpm | 4000 | |||
| Rated Torque | N.m | 0.0625 | 0.125 | 0.185 | 0.25 |
| Peak Current | Amps | 1.8 | 3.3 | 4.8 | 6.3 |
| Rated Power | W | 26 | 52.5 | 77.5 | 105 |
| Peak Torque | N.m | 0.19 | 0.38 | 0.56 | 0.75 |
| Peak Current | Amps | 5.4 | 10.6 | 15.5 | 20 |
| Back E.M.F | V/Krpm | 4.1 | 4.2 | 4.3 | 4.3 |
| Torque Constant | N.m/A | 0.039 | 0.04 | 0.041 | 0.041 |
| Rotor Inertia | g.cm2 | 24 | 48 | 72 | 96 |
| Body Length | mm | ||||
| Weight | Kg | ||||
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | ||||
| JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 4 | ||||
| Rated Voltage | VDC | 36 | ||||
| Rated Speed | Rpm | 4000 | ||||
| Rated Torque | N.m | 0.055 | 0.11 | 0.22 | 0.33 | 0.44 |
| Rated Current | Amps | 1.2 | 2 | 3.6 | 5.3 | 6.8 |
| Rated Power | W | 23 | 46 | 92 | 138 | 184 |
| Peak Torque | N.m | 0.16 | 0.33 | 0.66 | 1 | 1.32 |
| Peak Current | Amps | 3.5 | 6.8 | 11.5 | 15.5 | 20.5 |
| Back E.M.F | V/Krpm | 7.8 | 7.7 | 7.4 | 7.3 | 7.1 |
| Torque Constant | N.m/A | 0.074 | 0.073 | 0.07 | 0.07 | 0.068 |
| Rotor Inertia | g.cm2 | 30 | 75 | 119 | 173 | 230 |
| Body Length | mm | 37 | 47 | 67 | 87 | 107 |
| Weight | Kg | 0.33 | 0.44 | 0.75 | 1 | 1.25 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| Specification | Unit | Model | |||
| JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.3 | 0.6 | 0.9 | 1.2 |
| Rated Current | Amps | 2.8 | 5.2 | 7.5 | 9.5 |
| Rated Power | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | 0.9 | 1.8 | 2.7 | 3.6 |
| Peak Current | Amps | 8.4 | 15.6 | 22.5 | 28.5 |
| Back E.M.F | V/Krpm | 12.1 | 12.6 | 12.4 | 13.3 |
| Torque Constant | N.m/A | 0.116 | 0.12 | 0.118 | 0.127 |
| Rotor Inertia | kg.cm2 | 0.24 | 0.48 | 0.72 | 0.96 |
| Body Length | mm | 78 | 99 | 120 | 141 |
| Weight | Kg | 0.85 | 1.25 | 1.65 | 2.05 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK80BLS01 | JK80BLS02 | JK80BLS03 | JK80BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 4 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 |
| Rated Current | Amps | 3 | 5.5 | 8 | 10.5 |
| Rated Power | W | 110 | 220 | 330 | 440 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 |
| Peak Current | Amps | 9 | 16.5 | 24 | 31.5 |
| Back E.M.F | V/Krpm | 13.5 | 13.3 | 13.1 | 13 |
| Torque Constant | N.m/A | 0.13 | 0.127 | 0.126 | 0.124 |
| Rotor Inertia | g.cm2 | 210 | 420 | 630 | 840 |
| Body Length | mm | 78 | 98 | 118 | 138 |
| Weight | Kg | 1.4 | 2 | 2.6 | 3.2 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK110BLS050 | JK110BLS75 | JK110BLS100 | JK110BLS125 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 310 | |||
| Rated Speed | Rpm | 3400 | |||
| Rated Torque | N.m | 2.38 | 3.3 | 5 | 6.6 |
| Rated Current | Amps | 0.5 | 0.6 | 0.8 | 1 |
| Rated Power | KW | 0.75 | 1.03 | 1.57 | 2.07 |
| Back E.M.F | V/Krpm | 91.1 | 91.1 | 91.1 | 88.6 |
| Torque Constant | N.m/A | 0.87 | 0.87 | 0.87 | 0.845 |
| Body Length | mm | 130 | 155 | 180 | 205 |
| Sensor | Honeywell | ||||
| Insulation Class | H | ||||
How to Select a Gear Motor
A gearmotor is an electrical machine that transfers energy from one place to another. There are many types of gearmotors. This article will discuss the types of gearmotors, including Angular geared motors, Planetary gearboxes, Hydraulic gear motors, and Croise motors. In addition to its uses, gearmotors have many different characteristics. In addition, each type has distinct advantages and disadvantages. Listed below are a few tips on selecting a gearmotor.
Angular geared motors
Angular geared motors are the optimum drive element for applications where torques, forces, and motions need to be transferred at an angle. Compared to other types of geared motors, these have few moving parts, a compact design, and a long life. Angular geared motors are also highly efficient in travel drive applications. In addition to their durability, they have a low maintenance requirement and are highly corrosion-resistant.
Helical worm geared motors are a low-cost solution for drives that employ angular geared motors. They combine a worm gear stage and helical input stage to offer higher efficiency than pure worm geared motors. This drive solution is highly reliable and noise-free. Angular geared motors are often used in applications where noise is an issue, and helical worm geared motors are particularly quiet.
The gear ratio of an angular geared motor depends on the ratio between its input and output shaft. A high-quality helical geared motor has a relatively low mechanical noise level, and can be installed in almost any space. The torque of a helical geared motor can be measured by using frequency measurement equipment. The energy efficiency of angular geared motors is one of the most important factors when choosing a motor. Its symmetrical arrangement also allows it to operate in low-speed environments.
When selecting the right angular geared motor, it is important to keep in mind that increased torque will lead to poor output performance. Once a gear motor reaches its stall torque, it will no longer function properly. This makes it important to consult a performance curve to choose the appropriate motor. Most DC motor manufacturers are more than happy to provide these to customers upon request. Angular geared motors are more expensive than conventional worm gear motors.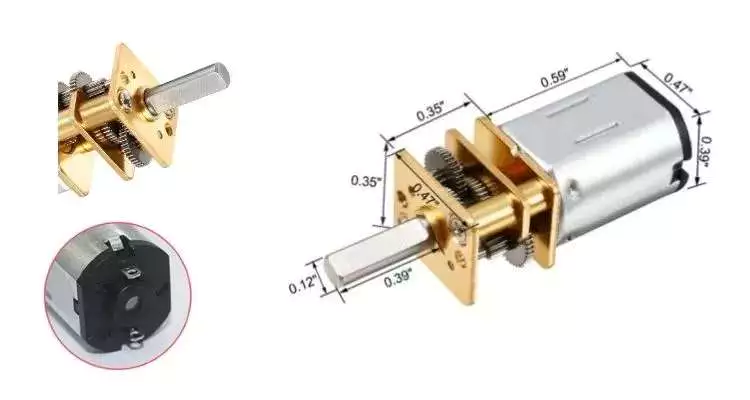
Planetary gearboxes
Planetary gearboxes are used in industrial machinery to generate higher torque and power density. There are three main types of planetary gearboxes: double stage, triple stage, and multistage. The central sun gear transfers torque to a group of planetary gears, while the outer ring and spindle provide drive to the motor. The design of planetary gearboxes delivers up to 97% of the power input.
The compact size of planetary gears results in excellent heat dissipation. In some applications, lubrication is necessary to improve durability. Nevertheless, if you are looking for high speed transmission, you should consider the additional features, such as low noise, corrosion resistance, and construction. Some constructors are better than others. Some are quick to respond, while others are unable to ship their products in a timely fashion.
The main benefit of a planetary gearbox is its compact design. Its lightweight design makes it easy to install, and the efficiency of planetary gearboxes is up to 0.98%. Another benefit of planetary gearboxes is their high torque capacity. These gearboxes are also able to work in applications with limited space. Most modern automatic transmissions in the automotive industry use planetary gears.
In addition to being low in cost, planetary gearboxes are a great choice for many applications. Neugart offers both compact and right angle versions. The right angle design offers a high power-to-weight ratio, making it ideal for applications where torque is needed to be transmitted in reverse mode. So if you’re looking for an efficient way to move heavy machinery around, planetary gearboxes can be a great choice.
Another advantage of planetary gearboxes is their ability to be easily and rapidly changed from one application to another. Since planetary gears are designed to be flexible, you don’t have to buy new ones if you need to change gear ratios. You can also use planetary gears in different industries and save on safety stock by sharing common parts. These gears are able to withstand high shock loads and demanding conditions.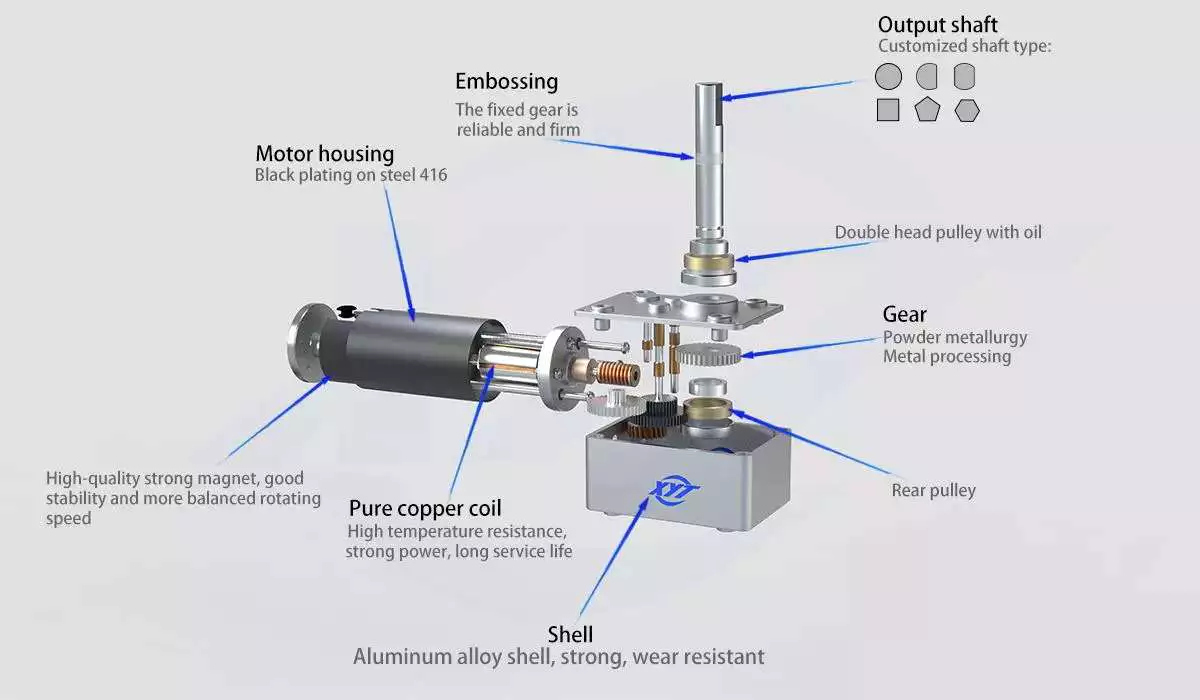
Hydraulic gear motors
Hydraulic gear motors are driven by oil that is pumped into a gear box and causes the gears to rotate. This method of energy production is quiet and inexpensive. The main drawbacks of hydraulic gear motors are that they are noisy and inefficient at low speeds. The other two types of hydraulic motors are piston and vane-type hydraulic motors. The following are some common benefits of hydraulic gear motors.
A hydraulic gear motor is composed of two gears – a driven gear and an idler. The driven gear is attached to the output shaft via a key. High-pressure oil flows into the housing between the gear tips and the motor housing, and the oil then exits through an outlet port. Unlike a conventional gear motor, the gears mesh to prevent the oil from flowing backward. As a result, they are an excellent choice for agricultural and industrial applications.
The most common hydraulic gear motors feature a gerotor and a drive gear. These gears mesh with a larger gear to produce rotation. There are also three basic variations of gear motors: roller-gerotor, gerotor, and differential. The latter produces higher torque and less friction than the previous two. These differences make it difficult to choose which type is the best for your needs. A high-performance gear motor will last longer than an ordinary one.
Radial piston hydraulic motors operate in the opposite direction to the reciprocating shaft of an electric gearmotor. They have nine pistons arranged around a common center line. Fluid pressure causes the pistons to reciprocate, and when they are stationary, the pistons push the fluid out and move back in. Because of the high pressure created by the fluid, they can rotate at speeds up to 25,000RPM. In addition, hydraulic gear motors are highly efficient, allowing them to be used in a wide range of industrial and commercial applications.
Hydraulic gear motors complement hydraulic pumps and motors. They are also available in reversible models. To choose the right hydraulic motor for your project, take time to gather all the necessary information about the installation process. Some types require specialized expertise or complicated installation. Also, there are some differences between closed and open-loop hydraulic motors. Make sure to discuss the options with a professional before you make a decision.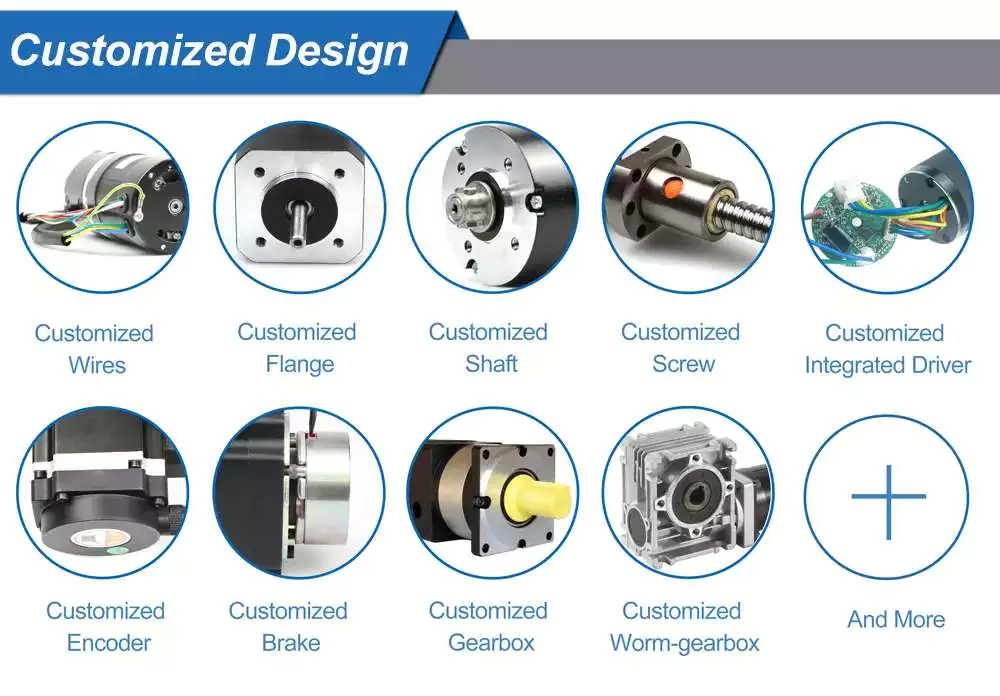
Croise motors
There are many advantages to choosing a Croise gear motor. It is highly compact, with less weight and space than standard motors. Its right-angle shaft and worm gear provide smooth, quiet operation. A silent-type brake ensures no metallic sound during operation. It also offers excellent positioning accuracy and shock resistance. This is why this motor is ideal for high-frequency applications. Let’s take a closer look.
A properly matched gearmotor will provide maximum torque output in a specified period. Its maximum developing torque is typically the rated output torque. A one-twelfth-horsepower (1/8 horsepower) motor can meet torque requirements of six inch-pounds, without exceeding its breakdown rating. This lower-cost unit allows for production variations and allows the customer to use a less powerful motor. Croise gear motors are available in a variety of styles.
editor by czh 2023-01-09
China 36mm Planetary Gearbox 120rpm 24V DC Gear Motor High Torque Low Rpm Motors for Robots with high quality
Item Description
Tranquil steady and dependable for extended life operation
| Motor sort | 63ZYT-a hundred twenty five-24 | |
| Defense grade | IP50 | |
| Responsibility cycle | S1 (a hundred%) | |
| Rated voltage | 24 | V |
| Rated recent | four.9 | A |
| Enter energy | 117.six | W |
| No-load present | .four | A |
| Rated torque | .27 | Nm |
| Rated velocity | 3300 | ±10% rpm |
| Rated output power | ninety three.three | W |
| Friction torque | two | Ncm |
| effectiveness | 80% | |
| Maximum torque | one.3 | ±10% Nm |
| Greatest existing | 23 | A |
| No-load velocity | 3650 | ±10% rpm |
| Highest energy | 245 | W |
| Optimum shell temperature | eighty five | ºC |
| Weight | 1.7 | Kg |
| Planetary gear box | F1130 | |
| Protection quality | IP65 | |
| Reduction ratio | 710.5:one | |
| Rated torque | a hundred and twenty | Nm |
| Optimum torque | a hundred and eighty | Nm |
| Ambient temperature | -20 to 85 | ºC |
| Grease Intelligent | Smart top 28 | |
| Grease temperature assortment | -20 to 160 | ºC |
|
US $85-130 / Piece | |
50 Pieces (Min. Order) |
###
| Function: | Control, Driving |
|---|---|
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Certification: | ISO9001, CCC, CE |
| Brand: | Jintian |
| Power: | 117.6W |
###
| Samples: |
US$ 162/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Motor type | 63ZYT-125-24 | |
| Protection grade | IP50 | |
| Duty cycle | S1 (100%) | |
| Rated voltage | 24 | V |
| Rated current | 4.9 | A |
| Input power | 117.6 | W |
| No-load current | 0.4 | A |
| Rated torque | 0.27 | Nm |
| Rated speed | 3300 | ±10% rpm |
| Rated output power | 93.3 | W |
| Friction torque | 2 | Ncm |
| efficiency | 80% | |
| Maximum torque | 1.3 | ±10% Nm |
| Maximum current | 23 | A |
| No-load speed | 3650 | ±10% rpm |
| Maximum power | 245 | W |
| Maximum shell temperature | 85 | ºC |
| Weight | 1.7 | Kg |
| Planetary gear box | F1130 | |
| Protection grade | IP65 | |
| Reduction ratio | 710.5:1 | |
| Rated torque | 120 | Nm |
| Maximum torque | 180 | Nm |
| Ambient temperature | -20 to 85 | ºC |
| Grease Smart | Smart top 28 | |
| Grease temperature range | -20 to 160 | ºC |
|
US $85-130 / Piece | |
50 Pieces (Min. Order) |
###
| Function: | Control, Driving |
|---|---|
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Certification: | ISO9001, CCC, CE |
| Brand: | Jintian |
| Power: | 117.6W |
###
| Samples: |
US$ 162/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Motor type | 63ZYT-125-24 | |
| Protection grade | IP50 | |
| Duty cycle | S1 (100%) | |
| Rated voltage | 24 | V |
| Rated current | 4.9 | A |
| Input power | 117.6 | W |
| No-load current | 0.4 | A |
| Rated torque | 0.27 | Nm |
| Rated speed | 3300 | ±10% rpm |
| Rated output power | 93.3 | W |
| Friction torque | 2 | Ncm |
| efficiency | 80% | |
| Maximum torque | 1.3 | ±10% Nm |
| Maximum current | 23 | A |
| No-load speed | 3650 | ±10% rpm |
| Maximum power | 245 | W |
| Maximum shell temperature | 85 | ºC |
| Weight | 1.7 | Kg |
| Planetary gear box | F1130 | |
| Protection grade | IP65 | |
| Reduction ratio | 710.5:1 | |
| Rated torque | 120 | Nm |
| Maximum torque | 180 | Nm |
| Ambient temperature | -20 to 85 | ºC |
| Grease Smart | Smart top 28 | |
| Grease temperature range | -20 to 160 | ºC |
Dynamic Modeling of a Planetary Motor
A planetary gear motor consists of a series of gears rotating in perfect synchrony, allowing them to deliver torque in a higher output capacity than a spur gear motor. Unlike the planetary motor, spur gear motors are simpler to build and cost less, but they are better for applications requiring lower torque output. That is because each gear carries the entire load. The following are some key differences between the two types of gearmotors.
planetary gear system
A planetary gear transmission is a type of gear mechanism that transfers torque from one source to another, usually a rotary motion. Moreover, this type of gear transmission requires dynamic modeling to investigate its durability and reliability. Previous studies included both uncoupled and coupled meshing models for the analysis of planetary gear transmission. The combined model considers both the shaft structural stiffness and the bearing support stiffness. In some applications, the flexible planetary gear may affect the dynamic response of the system.
In a planetary gear device, the axial end surface of the cylindrical portion is rotatable relative to the separating plate. This mechanism retains lubricant. It is also capable of preventing foreign particles from entering the planetary gear system. A planetary gear device is a great choice if your planetary motor’s speed is high. A high-quality planetary gear system can provide a superior performance than conventional systems.
A planetary gear system is a complex mechanism, involving three moving links that are connected to each other through joints. The sun gear acts as an input and the planet gears act as outputs. They rotate about their axes at a ratio determined by the number of teeth on each gear. The sun gear has 24 teeth, while the planet gears have three-quarters that ratio. This ratio makes a planetary motor extremely efficient.
planetary gear train
To predict the free vibration response of a planetary motor gear train, it is essential to develop a mathematical model for the system. Previously, static and dynamic models were used to study the behavior of planetary motor gear trains. In this study, a dynamic model was developed to investigate the effects of key design parameters on the vibratory response. Key parameters for planetary gear transmissions include the structure stiffness and mesh stiffness, and the mass and location of the shaft and bearing supports.
The design of the planetary motor gear train consists of several stages that can run with variable input speeds. The design of the gear train enables the transmission of high torques by dividing the load across multiple planetary gears. In addition, the planetary gear train has multiple teeth which mesh simultaneously in operation. This design also allows for higher efficiency and transmittable torque. Here are some other advantages of planetary motor gear trains. All these advantages make planetary motor gear trains one of the most popular types of planetary motors.
The compact footprint of planetary gears allows for excellent heat dissipation. High speeds and sustained performances will require lubrication. This lubricant can also reduce noise and vibration. But if these characteristics are not desirable for your application, you can choose a different gear type. Alternatively, if you want to maintain high performance, a planetary motor gear train will be the best choice. So, what are the advantages of planetary motor gears?
planetary gear train with fixed carrier train ratio
The planetary gear train is a common type of transmission in various machines. Its main advantages are high efficiency, compactness, large transmission ratio, and power-to-weight ratio. This type of gear train is a combination of spur gears, single-helical gears, and herringbone gears. Herringbone planetary gears have lower axial force and high load carrying capacity. Herringbone planetary gears are commonly used in heavy machinery and transmissions of large vehicles.
To use a planetary gear train with a fixed carrier train ratio, the first and second planets must be in a carrier position. The first planet is rotated so that its teeth mesh with the sun’s. The second planet, however, cannot rotate. It must be in a carrier position so that it can mesh with the sun. This requires a high degree of precision, so the planetary gear train is usually made of multiple sets. A little analysis will simplify this design.
The planetary gear train is made up of three components. The outer ring gear is supported by a ring gear. Each gear is positioned at a specific angle relative to one another. This allows the gears to rotate at a fixed rate while transferring the motion. This design is also popular in bicycles and other small vehicles. If the planetary gear train has several stages, multiple ring gears may be shared. A stationary ring gear is also used in pencil sharpener mechanisms. Planet gears are extended into cylindrical cutters. The ring gear is stationary and the planet gears rotate around a sun axis. In the case of this design, the outer ring gear will have a -3/2 planet gear ratio.
planetary gear train with zero helix angle
The torque distribution in a planetary gear is skewed, and this will drastically reduce the load carrying capacity of a needle bearing, and therefore the life of the bearing. To better understand how this can affect a gear train, we will examine two studies conducted on the load distribution of a planetary gear with a zero helix angle. The first study was done with a highly specialized program from the bearing manufacturer INA/FAG. The red line represents the load distribution along a needle roller in a zero helix gear, while the green line corresponds to the same distribution of loads in a 15 degree helix angle gear.
Another method for determining a gear’s helix angle is to consider the ratio of the sun and planet gears. While the sun gear is normally on the input side, the planet gears are on the output side. The sun gear is stationary. The two gears are in engagement with a ring gear that rotates 45 degrees clockwise. Both gears are attached to pins that support the planet gears. In the figure below, you can see the tangential and axial gear mesh forces on a planetary gear train.
Another method used for calculating power loss in a planetary gear train is the use of an auto transmission. This type of gear provides balanced performance in both power efficiency and load capacity. Despite the complexities, this method provides a more accurate analysis of how the helix angle affects power loss in a planetary gear train. If you’re interested in reducing the power loss of a planetary gear train, read on!
planetary gear train with spur gears
A planetary gearset is a type of mechanical drive system that uses spur gears that move in opposite directions within a plane. Spur gears are one of the more basic types of gears, as they don’t require any specialty cuts or angles to work. Instead, spur gears use a complex tooth shape to determine where the teeth will make contact. This in turn, will determine the amount of power, torque, and speed they can produce.
A two-stage planetary gear train with spur gears is also possible to run at variable input speeds. For such a setup, a mathematical model of the gear train is developed. Simulation of the dynamic behaviour highlights the non-stationary effects, and the results are in good agreement with the experimental data. As the ratio of spur gears to spur gears is not constant, it is called a dedendum.
A planetary gear train with spur gears is a type of epicyclic gear train. In this case, spur gears run between gears that contain both internal and external teeth. The circumferential motion of the spur gears is analogous to the rotation of planets in the solar system. There are four main components of a planetary gear train. The planet gear is positioned inside the sun gear and rotates to transfer motion to the sun gear. The planet gears are mounted on a joint carrier that is connected to the output shaft.
planetary gear train with helical gears
A planetary gear train with helical teeth is an extremely powerful transmission system that can provide high levels of power density. Helical gears are used to increase efficiency by providing a more efficient alternative to conventional worm gears. This type of transmission has the potential to improve the overall performance of a system, and its benefits extend far beyond the power density. But what makes this transmission system so appealing? What are the key factors to consider when designing this type of transmission system?
The most basic planetary train consists of the sun gear, planet gear, and ring gear elements. The number of planets varies, but the basic structure of planetary gears is similar. A simple planetary geartrain has the sun gear driving a carrier assembly. The number of planets can be as low as two or as high as six. A planetary gear train has a low mass inertia and is compact and reliable.
The mesh phase properties of a planetary gear train are particularly important in designing the profiles. Various parameters such as mesh phase difference and tooth profile modifications must be studied in depth in order to fully understand the dynamic characteristics of a PGT. These factors, together with others, determine the helical gears’ performance. It is therefore essential to understand the mesh phase of a planetary gear train to design it effectively.
editor by czh 2023-01-06
China 36mm High Torque 5n. M 10n. M 24V Brushed Brushless BLDC Planetary Gearbox Gear Motor for Robot motor engine
Product Description
SHN Motors
1.Features
1) Step Angle Accuracy: ±5%
2) Resistance Accuracy: ±10%
3) Inductance Accuracy: ±20%
4) Temperature Rise: 80°C Max
5) Ambient Temperature: -20°C~+50°C
6) Insulation Resistance: 100MΩ Min., 500VDC
7) Dielectric Strength: 500VAC for 1 minute
8) Shaft Radial Play: 0.02Max (450g-load)
9) Shaft Axial Play: 0.08Max (450g-load)
2.Related Specifications
1) 42mm series
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
2) 70mmSeries
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
3) 80mmSeries
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
4) 86mmSeries
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
5) 60mmSeries
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
6) 57mm Series
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
7) 57 High Torque
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
3.Outlines/Drawings
4.About US
5.Main Products
6.Package and Shipping
1.FedEX / DHL / UPS / TNT for samples,Door to door service;
2.By sea for batch goods;
3.Customs specifying freight forwarders or negotiable shipping methods;
4.Delivery Time:20-25 Days for samples;30-35 Days for batch goods;
5.Payment Terms:T/T,L/C at sight,D/P etc.
7.FAQ
Q1. When can I get the quotation?
We usually quote within 24 hours after we get your inquiry.
If you are urgent to get the price, please send the message on and or call us directly.
Q2. How can I get a sample to check your quality?
After price confirmed, you can requiry for samples to check quality.
If you need the samples, we will charge for the sample cost.
But the sample cost can be refundable when your quantity of first order is above the MOQ
Q3. Can you do OEM for us?
Yes, the product packing can be designed as you want.
Q4. How about MOQ?
1 pcs for carton box.
Q5. What is your main market?
Eastern Europe, Southeast Asia, South America.
Please feel free to contact us if you have any question.
|
US $20-40 / Piece | |
100 Pieces (Min. Order) |
###
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
###
| Samples: |
US$ 100/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
###
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
###
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
###
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
###
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
###
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
###
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
|
US $20-40 / Piece | |
100 Pieces (Min. Order) |
###
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
###
| Samples: |
US$ 100/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
###
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
###
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
###
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
###
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
###
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
###
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
The Basics of a Gear Motor
The basic mechanism behind the gear motor is the principle of conservation of angular momentum. The smaller the gear, the more RPM it covers and the larger the gear, the more torque it produces. The ratio of angular velocity of two gears is called the gear ratio. Moreover, the same principle applies to multiple gears. This means that the direction of rotation of each adjacent gear is always the opposite of the one it is attached to.
Induction worm gear motor
If you’re looking for an electric motor that can deliver high torque, an Induction worm gear motor might be the right choice. This type of motor utilizes a worm gear attached to the motor to rotate a main gear. Because this type of motor is more efficient than other types of motors, it can be used in applications requiring massive reduction ratios, as it is able to provide more torque at a lower speed.
The worm gear motor is designed with a spiral shaft that is set into splines in another gear. The speed at which the worm gear rotates is dependent on the torque produced by the main gear. Induction worm gear motors are best suited for use in low-voltage applications such as electric cars, renewable energy systems, and industrial equipment. They come with a wide range of power-supply options, including twelve-volt, 24-volt, and 36-volt AC power supplies.
These types of motors can be used in many industrial settings, including elevators, airport equipment, food packaging facilities, and more. They also produce less noise than other types of motors, which makes them a popular choice for manufacturers with limited space. The efficiency of worm gearmotors makes them an excellent choice for applications where noise is an issue. Induction worm gear motors can be compact and extremely high-torque.
While the Induction worm gear motor is most widely used in industrial applications, there are other kinds of gearmotors available. Some types are more efficient than others, and some are more expensive than others. For your application, choosing the correct motor and gearbox combination is crucial to achieving the desired result. You’ll find that the Induction worm gear motor is an excellent choice for many applications. The benefits of an Induction worm gear motor can’t be overstated.
The DC gear motor is an excellent choice for high-end industrial applications. This type of gearmotor is smaller and lighter than a standard AC motor and can deliver up to 200 watts of torque. A gear ratio of three to two can be found in these motors, which makes them ideal for a wide range of applications. A high-quality DC gear motor is a great choice for many industrial applications, as they can be highly efficient and provide a high level of reliability.
Electric gear motors are a versatile and widely used type of electric motor. Nevertheless, there are some applications that don’t benefit from them, such as applications with high shaft speed and low torque. Applications such as fan motors, pump and scanning machines are examples of such high-speed and high-torque demands. The most important consideration when choosing a gearmotor is its efficiency. Choosing the right size will ensure the motor runs efficiently at peak efficiency and will last for years.
Parallel shaft helical gear motor
The FC series parallel shaft helical gearmotor is a compact, lightweight, and high-performance unit that utilizes a parallel shaft structure. Its compact design is complemented by high transmission efficiency and high carrying capacity. The motor’s material is 20CrMnTi alloy steel. The unit comes with either a flanged input or bolt-on feet for installation. Its low noise and compact design make it an ideal choice for a variety of applications.
The helical gears are usually arranged in two rows of one another. Each row contains one or more rows of teeth. The parallel row has the teeth in a helical pattern, while the helical rows are lined up parallelly. In addition to this, the cross helical gears have a point contact design and do not overlap. They can be either parallel or crossed. The helical gear motors can have any number of helical pairs, each with a different pitch circle diameter.
The benefits of the Parallel Shaft Helical Gearbox include high temperature and pressure handling. It is produced by skilled professionals using cutting-edge technology, and is widely recognized for its high performance. It is available in a range of technical specifications and is custom-made to suit individual requirements. These gearboxes are durable and low-noise and feature high reliability. You can expect to save up to 40% of your energy by using them.
The parallel shaft helical gear motors are designed to reduce the speed of a rotating part. The nodular cast iron housing helps make the unit robust in difficult environments, while the precision-machined gears provide quiet, vibration-free operation. These motors are available in double reduction, triple reduction, and quadruple reduction. The capacity ranges from 0.12 kW to 45 kW. You can choose from a wide variety of capacities, depending on the size of your gearing needs.
The SEW-EURODRIVE parallel shaft helical gearmotor is a convenient solution for space-constrained applications. The machine’s modular design allows for easy mounting and a wide range of ambient temperatures. They are ideal for a variety of mechanical applications, including conveyors, augers, and more. If you want a small footprint, the SEW-EURODRIVE parallel shaft helical gear motor is the best solution for you.
The parallel shaft helical gears are advantageous for both high and low speed applications. Parallel helical gears are also suitable for low speed and low duty applications. A good example of a cross-helix gear is the oil pump of an internal combustion engine. Both types of helical gears are highly reliable and offer vibration-free operation. They are more costly than conventional gear motors, but offer more durability and efficiency.
Helical gear unit
This helical gear unit is designed to operate under a variety of demanding conditions and can be used in a wide range of applications. Designed for long life and high torque density, this gear unit is available in a variety of torques and gear ratios. Its design and construction make it compatible with a wide range of critical mechanical systems. Common applications include conveyors, material handling, steel mills, and paper mills.
Designed for high-performance applications, the Heidrive helical gear unit provides superior performance and value. Its innovative design allows it to function well under a wide range of operating conditions and is highly resistant to damage. These gear motors can be easily combined with a helical gear unit. Their combined power output is 100 Nm, and they have a high efficiency of up to 90%. For more information about the helical gear motor, contact a Heidrive representative.
A helical gear unit can be classified by its reference section in the standard plane or the turning plane. Its center gap is the same as that of a spur gear, and its number of teeth is the same. In addition to this, the helical gear has a low axial thrust, which is another important characteristic. The helical gear unit is more efficient at transferring torque than a spur gear, and it is quieter, too.
These units are designed to handle large loads. Whether you are using them for conveyors, augers, or for any other application that involves high-speed motion, a helical gear unit will deliver maximum performance. A helical gear unit from Flender can handle 400,000 tasks with a high degree of reliability. Its high efficiency and high resistance to load ensures high plant availability. These gear motors are available in a variety of sizes, from single-speed to multi-speed.
PEC geared motors benefit from decades of design experience and high quality materials. They are robust, quiet, and offer excellent performance. They are available in multiple configurations and are dimensionally interchangeable with other major brands. The gear motors are manufactured as modular kits to minimize inventory. They can be fitted with additional components, such as backstops and fans. This makes it easy to customize your gear motors and save money while reducing costs.
Another type of helical gears is the double helical gear. The double helical gear unit has two helical faces with a gap between them. They are better for enclosed gear systems as they provide greater tooth overlap and smoother performance. Compared to double helical gears, they are smaller and more flexible than the Herringbone type. So, if you’re looking for a gear motor, a helical gear unit may be perfect for you.
editor by czh 2022-11-27